 2014-01-25
2014-01-25 779
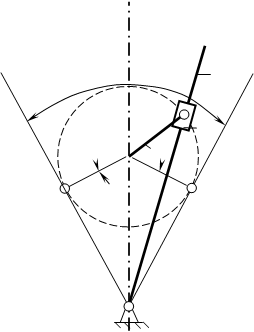
779Найдем крайние положения кулисного механизма, изображенного на рисунке 5. Для этого радиусом O1B описываем траекторию движения точки В. Из точки O2 проводим касательные к этой окружности. Из точки O1 проводим линии перпендикулярные к касательным. Получаем точки: B0 – крайнее правое положение кулисы CO2, BK – крайнее левое положение. Радиусом CO2 проводим траекторию точки С и находим крайние положения точки С – C0 и CK.
C
βmax φpx B ω1 2 O1 1 BK B0 φxx O2 Рисунок 5 – Кулисный механизм |











 CK 3 C0
CK 3 C0Обозначим βmax – угол между двумя крайними положениями коромысла – максимальный угол качания коромысла. Пусть угловая скорость кривошипа ω1 = const. При движении коромысла от C 0 до C K кривошип повернется на угол φpx - рабочий ход. При движении коромысла от C K до C 0, кривошип повернется на меньший угол - φxx - угол холостого хода.
Поскольку ω1 = const, то очевидно, что ωср.3 при φpx меньше, чем при φ xx. Обычно в машинах (станках) задаются коэффициентом изменения скорости хода КV:
|
KV =.
Определим время холостого и рабочего хода:
| |||
| |||
tpx =; txx =.
Средние угловые скорости кулисы:
| |||
| |||
ω3 cр.pх =; ω3 cр.xх =.
Определяем коэффициент изменения скорости хода:
|
KV = = =.
Подставим вместо t px и txx их значения:
 |
KV =: = >1.
Обычно коэффициент изменения скорости хода принимается по практическим соображениям в пределах 1,5 – 2,0.
Таким образом уже на стадии проектирования кулисного механизма мы можем заранее определить соотношение размеров звеньев кулисного механизма для обеспечения заданной производительности станка.








