 2014-01-25
2014-01-25 1809
1809Методические подходы к изучению риска
При измерении риска возникают сложные проблемы. Здесь существуют четыре разных подхода.
1. Первый – инженерный. Он опирается на статистику поломок и аварий, на вероятностный анализ безопасности (ВАБ): построение и расчет так называемых деревьев отказов и деревьев событий. С помощью первых предсказывают, во что может развиться тот или иной отказ техники, а деревья событий, наоборот, помогают проследить все причины, которые способны вызвать какое-то нежелательное явление. Когда деревья построены, рассчитывается вероятность реализации каждого из сценариев (каждой ветви), а затем – общая вероятность аварии на объекте.
2. Второй подход – модельный – построение моделей воздействия вредных факторов на человека и окружающую среду. Эти модели могут описывать как последствия обычной работы предприятий, так и ущерб от аварий на них.
3. Первые два подхода основаны на расчетах, однако для таких расчетов далеко не всегда хватает надежных исходных данных. И тогда настает очередь третьего подхода – экспертного: вероятности различных событий, связи между ними и последствия аварий определяют не вычислениями, а опросом опытных экспертов.
4. Наконец, в рамках четвертого подхода – социологического – исследуется отношение населения к разным видам риска, например, с помощью социологических опросов.
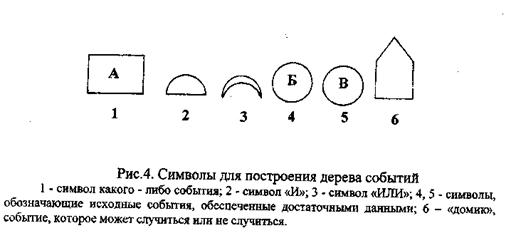
Любая опасность может быть реализована в нежелательное событие благодаря какой-то причине или нескольким причинам, которые, в свою очередь, являются следствием других причин. Причины и опасности образуют цепные структуры, или системы. Графическое изображение таких зависимостей напоминает ветвящееся дерево.
Ля построения и анализа таких деревьев используют символы событий, логические символы и логические операции. Чаще всего употребляются «И» и «ИЛИ»
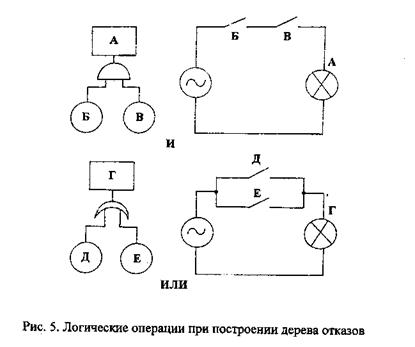
Операция «И» указывает, что для того чтобы произошло события А, должны произойти оба события Б и Ы. Операция «ИЛИ» указывает, что для того чтобы произошло событие Г, должно произойти одно из событий Д или Е. Вероятности событий А или Г рассчитываются по формулам:

где Р(А), Р(Б), Р(В), Р(Г), Р(Д), Р(Е) – вероятности событий А, Б, В, Г, Д и Е соответственно.
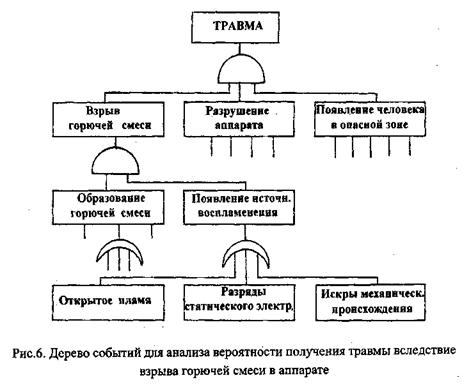
На рис.6 представлен пример анализа вероятности получения травмы вследствие взрыва горючей смеси в аппарате.
Графоаналитическое представление развития опасной ситуации с помощью «деревьев» используется при проведении количественного анализа надежности системы «человек-машина» (СЧМ).
1.2.2.2. Оценка надежности системы «человек - машина»
Под надежностью системы (или ее элемента) понимают свойство выполнять заданные функции в течение определенного времени при заданных условиях работы. Надежность следует понимать как совокупность трех свойств: безотказности, восстанавливаемости и долговечности.
Фундаментальным понятием теории надежности является понятие отказа. По отказом понимают случайное событие, состоящее в том, что система (элемент) полностью или частично утрачивает работоспособности, результате чего функции, заданные системе (элементу), не выполняются.
Оценка надежности системы «человек - машина» может производиться различными методами: аналитическим, экспериментальным, имитационным. На этапах проектирования преобладают расчетные методы, которые основаны на статистических данных о надежности и скорости выполнения заданных функций оператором, о надежности технических средств, о влиянии различных факторов внешней среды на надежность техники, о взаимном влиянии оператора и техники и прочее.
В системотехническом методе оценке надежности СЧМ человек представляется в виде компонента системы при допущении, что отказы техники и ошибки оператора являются редкими, случайными и независимыми событиями, что появление более одного однотипного события за время работы системы от t0 до t0 + t практически невозможно, что способности оператора к компенсации ошибок и безошибочной работе – независимые свойства оператора.
При этом выделяются следующие случаи оценки надежности системы взаимодействия технических средств и человека-оператора.
Если компенсация ошибок оператора и отказов техники невозможна, то вероятность безотказной работы системы может быть выражена как:
Р1 (t0, t) = Pτ (t0, t) P0(t) (1.3)
где Pτ (t0, t) - вероятность безотказной работы технических средств в течение времени (t0, t 0+t); P0 (t) – вероятность безошибочной работы оператора в течение времени t при условии, что техника работает безотказно; t0 - общее время эксплуатации системы; t - рассматриваемый период работы.
При «мгновенной» компенсации ошибок оператора с вероятностью р вероятность безотказной работы системы будет:
Р2 (t0, t) = Pτ (t0, t) {P0(t) + [ l - P0(t)] p} (1.4)
В случае компенсации только отказов технических средств вероятность безотказной работы системы равна:
Р3 (t0, t) = P0(t) [ Pτ (t0, t) + Pк(t0, t,δ) ] (1.5)
где Pк(t0, t,δ)] – условная вероятность безотказной работы системы в течение времени (t0 + t) с компенсацией последствий отказов при условии, что в момент δ (to <δ<to+t) произошел отказ.
Вероятность безотказной работы системы с компенсацией ошибок оператора и отказов технических средств может быть представлена в виде:
Р4 (t0, t) = {P0(t) + [ l - P0(t)] p} {[ Pτ (t0, t) + Pк(t0, t,δ)] } (1.6)
Выигрыш надежности увеличивается с ростом P и Pк(t0, t,δ), т.е. с увеличением уровня натренированности оператора на компенсации отказов оборудования и собственных ошибок.
В качестве показателя надежности технических систем часто используют коэффициент готовности Кг

где τр – время работы оборудования; τ0 – время простоя.
Аналогичным образом формируются показатели надежности работы оператора, например, коэффициент готовности, характеризующий вероятность включения человека-оператора в работу в любой произвольный момент времени:
Коп = 1 – Т0 / Т, (1.7)
Где Т0 – время, в течение которого человек не может принять поступившую к нему информацию; Т – общее время работы человека-оператора.
Широкое и многообразное применение техники предъявляет все более высокие требования к ее соответствию человеческим возможностям. Современные человека-машинные системы следует рассматривать как сложные автоматизированные системы, в которых наряду с контурами чисто автоматического регулирования, состоящими только из технических звеньев, включены и функционируют контуры, замыкаемые через человеческое звено.
СЧМ в своем развитии проходи три стадии: проектирование, изготовление и эксплуатацию. Правильный и обоснованный учет человеческого фактора на каждой из этих стадий способствует достижению максимальной эффективности и безопасности.

