 2018-03-09
2018-03-09 257
257Методические указания к выполнению курсового проекта
Раздел 1 "Структура и кинематика плоских рычажных механизмов" (лист1)
В настоящей разработке содержится пояснения и указания к разделу «Структура и кинематика плоских рычажных механизмов» по теории механизмов и машин. В ней изложены основные сведения о структуре и проектирование плоских рычажных механизмов, кинематические исследование их методом планов, кроме того приведены варианты задания к курсовому проекту. Руководство может использовать при оформлении пояснительной записки курсового проекта по данному разделу.
Методические указания по выполнению курсового проекта подготовлено автором соответственно учебной программе по курсу "Теории механизмов и машин" для технических инженерных специальностей.
Структурный анализ плоских механизмов
Основные понятия и определения
Механизмом называется механическая система, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел. Тела, входящие в эту систему в ТММ, называют звеньями, а подвижные их соединения - кинематическими парами. Свободное тело в пространстве имеет 6 возможных (3 поступательные и 3 вращательные) движений, т.е. 6 степеней свободы. Ограничивая одно, два, … пять движений, можно получить кинематические пары 1, 2, 3, 4, 5 классов.
Несколько звеньев, соединенных между собой подвижно, образуют кинематическую цепь. Если звенья кинематической цепи совершают движение параллельно одной плоскости, т.е. плоскопараллельное движение, кинематическую цепь называют плоской, а механизм - плоским механизмом.
Степень подвижности кинематической цепи
В ТММ принято условное изображение звеньев, кинематических пар и механизмов (ГОСТ 2.770 – 68).
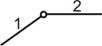
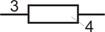
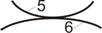
Таблица 1.1- Пример условных изображений кинематических пар
| Пример | Коленвал - корпус | Поршень - гильза | Колесо– рельсы |
| Условные изображения |
|
|
|
| Класс пар и название | V, вращ. низшая | V, поступ. низшая | IV, высшая |
| Возможное относительное движение |
|
|
|
Условные изображения отображают то, что влияет на относительное движение звеньев и характер передачи сил.
В таблице 1.1 приводятся примеры условных изображений кинематических пар плоской цепи.
Степень подвижности W (число координат, определяющих относительное положение звеньев плоской кинематической цепи) вычисляют по формуле.
 , (1.1)
, (1.1)
где n - число подвижных звеньев.
p 4, p 5 - количество пар соответственно IV и V классов.
Если степень подвижности кинематической цепи равна количеству заданных движений, то кинематическая цепь представляет собой механизм.
|
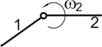
Рисунок 1.1 - Кинематическая цепь
|
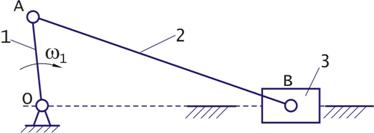
Пример 1. Дана кинематическая цепь, рис. 1.1 в которой задано движение w1 одного ведущего звена.
Выяснить: является ли эта кинематическая цепь механизмом
Изучив строение кинематической цепи, заполняем таблицу 1.2.
Таблица 1.2 - Условные обозначение и класс кинематических пар
| Кинем. пары. | 0 – 1 | 1 – 2 | 2 – 3 | 3 – 0 |
| Условные изображения | 
| 
| 
| 
|
| Класс пар | V | V | V | V |
Степень подвижности определяем по формуле (1.1)
W = 3 · 3 - 2 · 4 = 1
Следовательно, кинематическая цепь является механизмом.
Действительно каждому положению звена 1, соответствуют единственные положения звеньев 2 и 3.
|
Рисунок 1.2 - Кинематическая цепь |

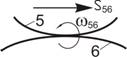
Пример 2. Дана кинематическая цепь, рис. 1.2 в которой задано движение w1 одного ведущего звена.
Выяснить: является ли эта кинематическая цепь механизмом.
Изучив строение кинематической цепи, заполняем таблицы 1.3 и 1.4.
Таблица 1.3 - Название звеньев кинематической
цепи
| № звена | 0 | 1 | 2 |
| Название звена | стойка | кулачок | толкатель |
Таблица 1.4 - Условное изображение кинематических пар
| Кинем. пары | 0 - 1 | 1 - 2 | 2 - 3 |
| Условное изображение | 
|

|

|
| Класс пар | V | IV | V |
Определить степень подвижности кинематической цепи. Название звеньев и кинематических пар приведены в таблицах 1.3 и 1.4. По формуле степени подвижности:
W = 3 · 2 - 2 · 2 - 1 · 1 = 1,
т.е. любому положению кулачка 1 соответствует единственное положение толкателя 2.








