 2018-03-09
2018-03-09 241
241Плоских рычажных механизмов методом планов
2.1. Исходные предпосылки
а) Кинематическая пара V класса вращательная
Подвижное соединение звеньев 1 и 2, в точке А - центр шарнира. Точка А1 принадлежит звену 1, а А2 - звену 2.
|
Рисунок 2.1 - Вращательная пара V класса |

В соединении точки А1 и А2 имеют одинаковые траектории и поэтому всегда справедливо:
 (2.1)
(2.1)
Б) Кинематическая пара V класса поступательная
|
Рисунок 2.2 - Поступательная пара V класса |
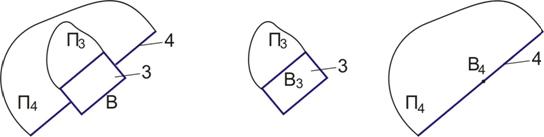
П3, П4 - плоскости жестко связанные со звеньями соответственно 3 и 4,
В3, В4 – точки, принадлежащие звеньям 3 и 4. Только в рассматриваемый момент они совпадают, поэтому:
 (2.2)
(2.2)
Деформации звеньев не учитывают, т.е. допускают, что они абсолютно жесткие
В) Сложное движение одного звена
|
Рисунок 2.3 - Кинематика звена |
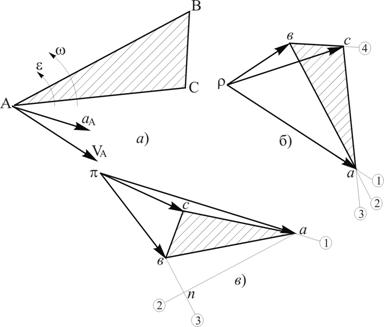
Сложное движение рассматривают как сумму переносного (вместе с какой-либо точкой) и релятивного (относительно этой точки) движении.
Пусть даны: ℓАВ, wАВ, e АВ,  ,
,  А (рис. 2.3)
А (рис. 2.3)
Найти:  , В.
, В.
Решение:
Векторное уравнения абсолютного движения точки В имеет вид:
 , (2.3)
, (2.3)
 (2.4)
(2.4)
т.е. сложное движение точки В - это сумма движений вместе с А (переносное) и вращение вокруг А (относительное).
План скоростей
Полюс плана скоростей обозначают p, масштаб скоростей выбирают так, чтобы известные векторы были показаны длиной (40 ¸ 80 ) мм. Так по известной величине принимают(pa), тогда:
|
Последовательность построения плана скоростей
 1. Из принятого полюса р (pис.2.3,б) проводится лини я 1 параллельно
1. Из принятого полюса р (pис.2.3,б) проводится лини я 1 параллельно  , на которой отложен отрезок (ра) = 60 мм. Получен вектор - первое слагаемое правой части (2.4).
, на которой отложен отрезок (ра) = 60 мм. Получен вектор - первое слагаемое правой части (2.4).
 2. Из полученной точки а проведеналиния 2 перпендикулярно (АВ), (см. рис. 2.3,б ) на которой отложен
2. Из полученной точки а проведеналиния 2 перпендикулярно (АВ), (см. рис. 2.3,б ) на которой отложен
Соединив точку в с полюсом р можно найти  .
.
План ускорения
Возможное движение точки В относительно А - вращательное. Поэтому выражение (2.5) примет вид:
 . (2.6)
. (2.6)
Полюс плана ускорений обозначают p, масштаб ускорений - m  .
.
Формула для построения плана ускорении (2.6). В этом уравнении неизвестны и величина и направление В. Поэтому построение векторов следует начать с правой части уравнения.
Последовательность построения плана ускорения.
1.  Из принятого полюса p проводится (pа)║ а A - линия 1 ║ а A (рис.2.3,
Из принятого полюса p проводится (pа)║ а A - линия 1 ║ а A (рис.2.3,  ) и строится
) и строится
 .
.
 2. Из точки a проводится линия 2, представляющая собой
2. Из точки a проводится линия 2, представляющая собой
 ║ (В → A).
║ (В → A).
 Такая запись конкретизирует направление: параллельно (АВ) и направлено от В к А (рис.2.3, ), поэтому линия 2 проведена от а влево и вниз, а не наоборот. На линии 2 отложен
Такая запись конкретизирует направление: параллельно (АВ) и направлено от В к А (рис.2.3, ), поэтому линия 2 проведена от а влево и вниз, а не наоборот. На линии 2 отложен

 .
.
1.  Из полученной точки n проводится прямая 3 ^ (AB) по направлению wВА. На этой линии отложен:
Из полученной точки n проводится прямая 3 ^ (AB) по направлению wВА. На этой линии отложен:
 .
.
Соединив полученную точку в с p, можно найти: 








