 2018-03-09
2018-03-09 231
231точки звена, например - С
Точка С принадлежит звену АВ. Известно, что линии соединяющие концы векторов скоростей (ускорений) точек какого - либо звена на плане скоростей (ускорений) и линий соединяющие одноименные точки на плане звена образуют подобные фигуры.
Определение скорости 
Следовательно, для определения необходимо построить - на плане скоростей Δ(авс) ~ Δ(ABC). Поскольку (ав) ^ (АВ), то справедливо (ас) ^ (АС), (вс) ^ (ВС).


 Поэтому через а (рис. 2.3, б) проведена линия 3 перпендикулярно (АС) и через в - 4 перпендикулярно (ВС). В пересечении линии 3 и 4 получится точка с тогда:
Поэтому через а (рис. 2.3, б) проведена линия 3 перпендикулярно (АС) и через в - 4 перпендикулярно (ВС). В пересечении линии 3 и 4 получится точка с тогда:
 .
.
Определение ускорение 
Несколько сложнее построение Δ(авс) ~ Δ(ABC) на плане ускорения. Предлагается наиболее простой способ. Стороны неизвестного Δ(авс) на плане ускорений можно найти:
 ,
, 
где (ав) - вектор из плана ускорений, мм (рис. 2.3,  ),
),
(АВ), (ВС), (АС) – размеры звена на схеме, мм (рис. 2.3, а).
После этого построение Δ(авс) возможно, при этом следует помнить, что полученный треугольник должен быть одноименным с исходными. Так при обходе вершин известного Δ(ABC) на схеме по часовой стрелке имеем сочетание букв А ® В ® С. Такое же сочетание должно получиться и у искомого Δ (авс). На (рис.2.3, ) точка С расположена над (ав). Тогда
 .
.
2.5. Движение звена вместе с другим звеном - поступательная кинематическая пара
Дана поступательная кинематическая пара V класса (рис.2.4), точки А3, А4 принадлежат соответственно звеньям 3 и 4, w3, e3 - закон движения звена 3, по которым можно найти скорость и ускорение любой его точки, так  и
и  (рис.2.4, б), S 43 - закон движения звена 4 по звену 3.
(рис.2.4, б), S 43 - закон движения звена 4 по звену 3.
Найти:  ,
,  .
.
Решение:
Уравнение движения точки А4, можно написать в виде:
 , (2.7)
, (2.7)
 . (2.8)
. (2.8)
Построение плана скоростей
 1. Из произвольно выбранного полюса p проводится линия 1 параллельно
1. Из произвольно выбранного полюса p проводится линия 1 параллельно  , на которой откладывается (ра 3), что определяет и масштаб скорости
, на которой откладывается (ра 3), что определяет и масштаб скорости 
 .
.
2.  Из точки а 3 (рис.2.4, г) проводится линия 2, представляющая
Из точки а 3 (рис.2.4, г) проводится линия 2, представляющая  , направление и величина, которой заданы (рис. 2.4, )
, направление и величина, которой заданы (рис. 2.4, )
 .
.
Соединив, полученную а 4 с p, получим:  .
.
|
Рисунок 2.4 - Кинематика звеньев в поступательной паре |
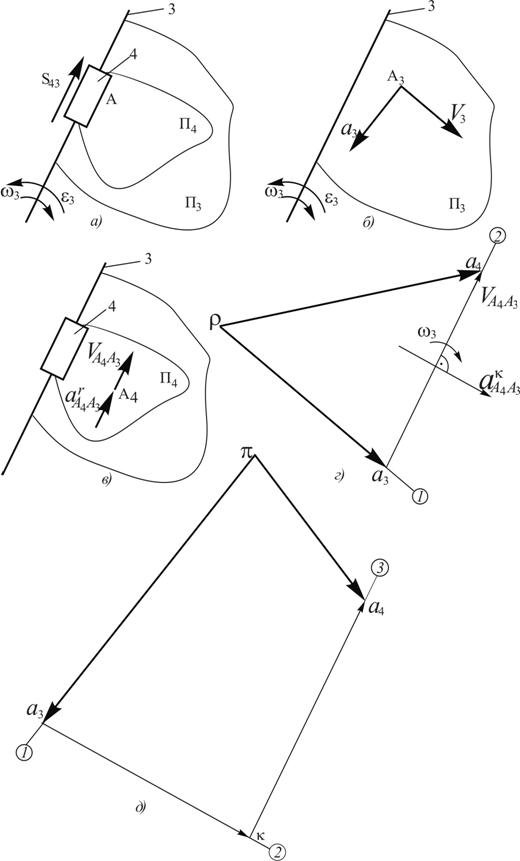
Построение плана ускорения
По условию даны и величина и направление ускорений и  (рис.2.4, в). Величина ускорения Кориолиса
(рис.2.4, в). Величина ускорения Кориолиса  равна удвоенному произведению угловой скорости переносного движения на одноимённую относительную скорость, для рассматриваемого случая
равна удвоенному произведению угловой скорости переносного движения на одноимённую относительную скорость, для рассматриваемого случая
 (2.9)
(2.9)
Для определения направления ускорения Кориолиса следует повернуть на 900 вектор одноимённой относительной скорости
(в рассматриваемом случае  , но не
, но не  ) по направлению переносного вращательного движения (в рассматриваемом случае по w3). Кратко вышеприведенное записывается в виде
) по направлению переносного вращательного движения (в рассматриваемом случае по w3). Кратко вышеприведенное записывается в виде
 , (2.10)
, (2.10)
 направлена от а 3 к а 4 - вверх. Поворачивая на 900 этот вектор по часовой стрелке (направление w3), (pис.2.4, г) получим направление
направлена от а 3 к а 4 - вверх. Поворачивая на 900 этот вектор по часовой стрелке (направление w3), (pис.2.4, г) получим направление  .
.
Таким образом, определены и направления и величины всех векторов правой части (2.8), т.е. графическое его решение (построение векторного четырехугольника) возможно.
 1. Из произвольно выбранного полюса p проводится линия 1 параллельно
1. Из произвольно выбранного полюса p проводится линия 1 параллельно  (рис.2.4, д) на этой линии откладывается:
(рис.2.4, д) на этой линии откладывается:
 2. Из этой а 3 проводится линия 2 параллельно . На этой линии откладывается:
2. Из этой а 3 проводится линия 2 параллельно . На этой линии откладывается:

 3. Из полученной точки к проводится линия 3 параллельно на которой откладывается
3. Из полученной точки к проводится линия 3 параллельно на которой откладывается
4. Соединив a 4 с p, можно вычислить  .
.








