 2018-03-09
2018-03-09 1775
1775Структурную схему механизма, выполненную в масштабе, называют кинематической схемой. Кинематическая схема механизма позволяет проводить кинематический и силовой его анализы. Действительный размер звена обозначают буквой ℓ с индексами названия.
Пример:
- ℓАВ – действительная длина звена (АВ), м
- (АВ) – длина этого звена на чертеже, мм
Отсюда выражение, определяющее масштаб, длин:
 (1.6)
(1.6)
В курсовом проекте масштаб длин следует выбирать так, чтобы схема механизма помещалась на 1/4 ÷ 1/6 части формата 24. Ориентиром при этом служит максимальное значение из ряда заданных размеров.
Пример1: Дана структурная схема механизма на рис.1.3. Заданы размеры некоторых звеньев и коэффициент изменения скорости:
|
Рисунок 1.7 - Кинематическая схема механизма |
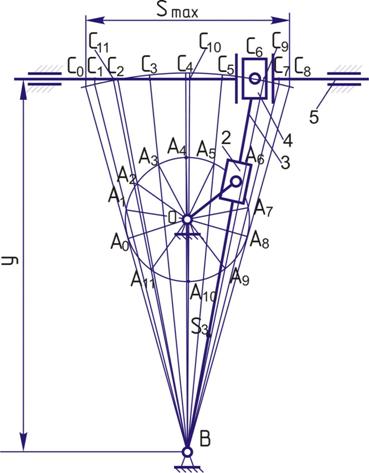
ℓОА= 0,13 м, ℓВС = 0,8 м
ℓУ = 0,7 м, ℓВS3 = 0,25 м
kV = 1,42
Порядок выполнения:
1. Ориентиром здесь при выборе масштаба следует считать ℓВС = 0,8 м. Принимаем на чертеже размер (ВС)= 200 мм, тогда по формуле (1.6):

2. Определяем недостающие размеры звеньев. Применив формулы (1.3 и 1.4) определяем расстояние ℓОВ,


3. Вычисляем размеры звеньев на чертеже (Рис.1.7).




По найденным размерам звеньев строим кинематическую схему механизма повторив пункты 4, 5, 6 в разделе 1.4.2.
4. Для построения 12 положений механизма разделим траекторию, описанную точкой А кривошипа ОА, на 12 частей, следующим образом: угол jх холостого хода на рисунке 1.6. разделим на 4 равных частей, а остальную (рабочий ход) - на 8 равных частей.
5. Отмеченные на окружности точки А0, А1 … А11 соединяем с центром В. Откладываем на них расстояние (ВС), получаем положения звена 3.
6. От точки В на расстояние У проводим горизонтальную линию, на которой намечаем положения звена 5
7. От точки С звена 3 проводим вертикальные линии до направляющей звена 5, отмечаем их точками С0, С1 … С11. Таким образом получаем 12 положений звеньев механизма (рис. 1.7).
Пример 2. Дана структурная схема кинематической цепи на рис.1.4. Заданы размеры некоторых звеньев и размах (крайние положения) коромысла, 
|
Рисунок 1.8 - Кинематическая схема механизма |
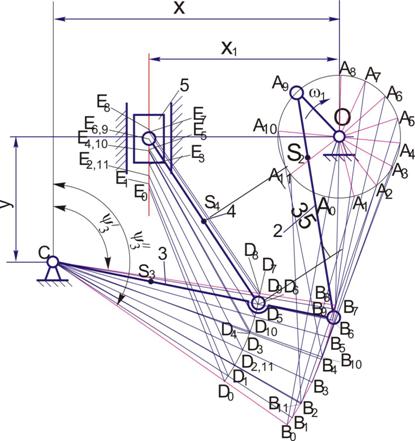
ℓХ = 0,25 м, ℓХ1 = 0,17 м
ℓУ= 0,11 м, y3"= 135°, y3'= 95°, ℓСВ = 0,25 м, ℓСD = 0,18 м, ℓDE= 0,17 м,
kV = 1,5, ℓAS2= 0,05 м, ℓDS4 = 0,085 м
ℓСS3 = 0,09 м
Порядок выполнения:
1. Ориентиром здесь при выборе масштаба следует считать ℓСB=0,25м. Принимаем на чертеже размер (ВС)= 200 мм, тогда по формуле (1.6):
2. Приняв ось вращения О кривошипа определяем центр вращения коромысла
СВ и положение направляющей ползуна 5

3. Отложив от вертикали в точке С углы  и
и  найдем крайние положения коромысла 3, соответственно крайние положения
найдем крайние положения коромысла 3, соответственно крайние положения  и
и 
 .
.
4. Соединим и с осью вращения О кривошипа.
5. Размеры кривошипа (ОА) и шатуна (АВ), на чертеже определяем по формуле (1.2.):

6. Действительные их длины:

7. Вычисляем размеры звеньев на чертеже (Рис.1.8).




По найденным размерам строим кинематическую схему механизма (рис. 1.8).
8. Для построения 12 положений механизма разделим траекторию, описанную точкой А кривошипа ОА, на 12 частей, начиная с крайнего положения с точки А0, следующим образом: дугу холостого хода jх на рисунке 1.8 разделим на 4 равных частей, а остальную (рабочий ход) - на 8 равных частей.
9. От отмеченных на окружности точек А0, А1 … А11 откладываем длину равной (АВ) звена 2 на дугу (СВ), соединив точки В0, В1 … В11 с центром С и получаем траекторию коромысла 3.
10. Из оси вращения коромысла С на линии (СВ) отмечаем положения точки D.
11. От точки D откладываем длину шатуна DE до линии направляющей ползуна 5 и отмечаем их точками Е0, Е1 … Е11. Таким образом получаем 12 положений звеньев механизма (рис.1.8).

