 2018-02-13
2018-02-13 610
610
ОПТИМАЛЬНАЯ ПО БЫСТРОДЕЙСТВИЮ СИСТЕМА УПРАВЛЕНИЯ
ОБЪЕКТОМ ТРЕТЬЕГО ПОРЯДКА
Цель работы. Практическое знакомство с синтезом оптимальной системы.
Теоретические сведения.
Рассмотрим линейный объект, имеющий передаточную функцию
Такую передаточную функцию имеет, например, летательный аппарат по каналу крена, если описывать привод элеронов апериодическим эвеном. Аналогичную передаточную функцию имеет электропривод, работающий на инерционную нагрузку, если в качестве усилителя мощности используется ЭМУ.
Итак, пусть движение объекта описывается дифференциальным уравнением в безразмерной форме
 (1)
(1)
здесь у - управляемая координата; u - управляющий параметр. Будем предполагать, что на управляющий параметр u наложено ограничение
 (2)
(2)
Рассмотрим следующую задачу: осуществить синтез оптимальной по быстродействию САР, считая, что входное воздеиствие y0 = g0, где g0 - любое действительное число.
Решение поставленной задачи можно разбить на два этапа. Первый этап включает в себя решение задачи синтеза оптимального управления, т.е. требуется найти оптимальное управление, которое должно задаваться в виде функции текущих координат системы и входного воздействия y0(t). Второй этап связан с реализацией оптимального регулятора. В частности, здесь необходимо получить удовлетворительную аппроксимацию поверхности переключения.
Введем ошибку x = y0 – y = g0 - y. Тогда управление (1) можно переписать в виде
 (3)
(3)
Рассмотрим пространство ошибок с декартовыми координатами  . В пространстве ошибок идеальному режиму слежения (y0(t) = y(t)) соответствует начало координат. Оптимальным является такое движение, при котором изображающая точка
. В пространстве ошибок идеальному режиму слежения (y0(t) = y(t)) соответствует начало координат. Оптимальным является такое движение, при котором изображающая точка  (рис. 1) переводится в начало координат за минимально возможное время.
(рис. 1) переводится в начало координат за минимально возможное время.

Рис. 1.
В соответствии с теоремой о числе переключений (см. конспект лекций или [1]) оптимальное по времени управление релейно, и допускаются два переключения реле. В фазовом пространстве системы (3) существует поверхность переключения такая, что по одну сторону от этой поверхности оптимальное управление u = A, а по другую - оптимальное управление u = -A. Для объекта (3) поверхность переключения представляет собой совокупность L2, т.е. совокупность всех возможных последних и предпоследних участков оптимальной траектории (рис.2).
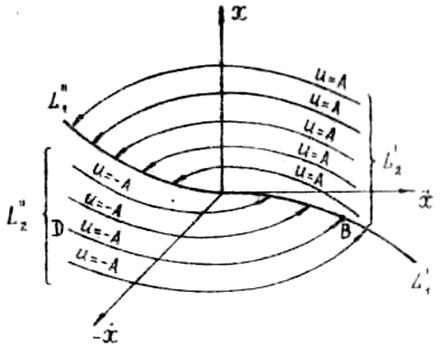
Рис. 2.
Можно, таким образом, утверждать, что поверхность переключения состоит из "особых" точек фазового пространства. Если такую точку рассматривать в качестве начальной точки оптимальной траектории x(t), то на траектории x(t) оптимальное управление u(t) может изменять знак не более одного раза.
Для расчета поверхности переключения удобно использовать принцип "попятного" движения A.A.Фельдбаума. Назовем траекторию движения системы (3) при u = const полутраекторией. Пусть x(t), 0 ≤ t ≤ t1 - полутраектория системы (3). Введем обратное время τ = t 1 - t. Если в прямом времени t (0 ≤ t ≤ t1) изображающая точка x проходит полутраекторию x(t) от начала к концу, то в обратном времени τ (0 ≤ τ ≤ t1) изображающая точка проходит эту траекторию от конца к началу. Легко установить следующее соотношение:
 (4)
(4)
Применяя соотношение (4) к уравнению (3), получим

или
 (5)
(5)
Полагая u = const, выпишем общее решение уравнения (5):
 (6)
(6)
Перейдем в уравнениях (6) к производным в прямом времени
 (7)
(7)
Постоянные интегрирования C1, C2, C3 находятся из условий

Уравнения (7) тогда примут вид
Опираясь на уравнения (8), можно построить поверхность переключения. При u=A, x10 = x20 = x30 = 0 уравнения (8) задают (в функции параметра τ) линию L1/ (см. рис. 2). Полутраекторию DB, принадлежащую совокупности L2//, можно найти, положив в уравнениях (8) u = -A и выбрав в качестве начальных значений x10, x20, x30 координаты точки B. Аналогичным образом строятся другие полутраектории совокупности L2//. Совокупность L2/ симметрична относительно начала координат совокупности L2//.
Положим K = 20, T1 = 10, T2 = 2, A = 200.
На рис.3 и 4 представлены проекции образующих поверхностей переключения траекторий на плоскости x1 = 0, x3 = 0.
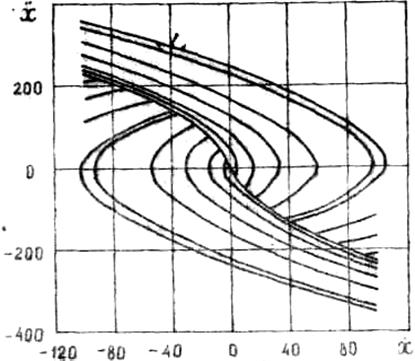
Рис. 3.
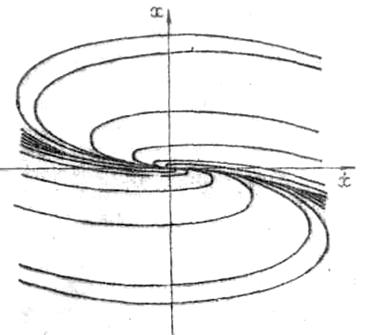
Рис. 4.
Обозначим через  уравнение поверхности переключения. Тогда оптимальное управление будет задаваться равенством
уравнение поверхности переключения. Тогда оптимальное управление будет задаваться равенством
 (9)
(9)
Для реализации оптимального закона управления (9) требуется построить функциональный преобразователь с двумя входами, реализующий функцию  . Степень сложности оптимального регулятора в существенной степени зависит от того, насколько удачно выбрана аппроксимация функции .
. Степень сложности оптимального регулятора в существенной степени зависит от того, насколько удачно выбрана аппроксимация функции .
На рис.5 приводятся сечения поверхности переключения плоскостями  .
.
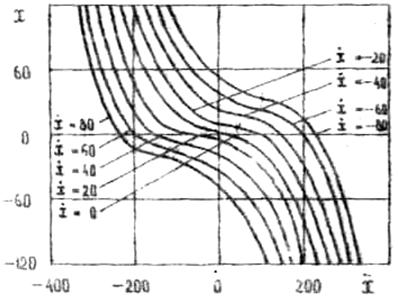
Рис. 5.
Обозначим через  уравнение “нулевого” сечения, т.е. сечения поверхности переключения плоскостью
уравнение “нулевого” сечения, т.е. сечения поверхности переключения плоскостью  . Из рис.5 следует, что любое сечение поверхности переключения плоскостью может быть получено (с известными приближениями) путем сдвига "нулевого" сечения вдоль оси абсцисс и вдаль оси ординат. Таким образом, поверхность переключения приближенно может быть записана в виде
. Из рис.5 следует, что любое сечение поверхности переключения плоскостью может быть получено (с известными приближениями) путем сдвига "нулевого" сечения вдоль оси абсцисс и вдаль оси ординат. Таким образом, поверхность переключения приближенно может быть записана в виде
Функции  и
и  снимаются графически с рис. 5.
снимаются графически с рис. 5.
На рис. 6 изображена структурная схема оптимальной по времени САР.
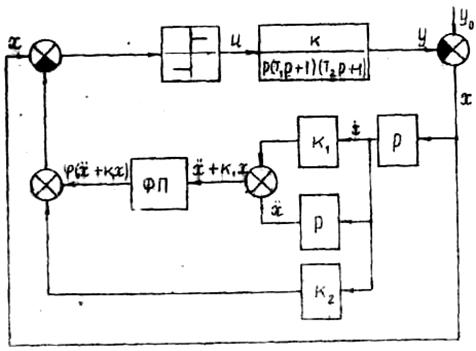
Рис. 6.
Объект исследования.
Объектом исследования является система, имеющая передаточную функцию
.
Движение такой системы описывается уравнением (1). Задачей проводимого исследования являемся овладение практическими навыками синтеза оптимальных по быстродействию систем третьего порядка. Так как полный синтез оптимальной системы является трудоёмкой задачей, то в процессе выполнения лабораторной работы на студентов возлагается самостоятельное выполнение лишь некоторых, наиболее сложных фрагментов синтеза.
Синтез оптимальной по быстродействию системы требует аппроксимации поверхности переключения. Это, в конечном счете, приводит к приближенной реализации оптимального закона управления. Моделирование оптимальной системы на АВМ позволяет оценить эффективность такого приближенного оптимального закона управления.
Порядок выполнения работы.
1. Усвоить описанный выше метод синтеза оптимального управления для системы третьего порядка.
2. Произвести аппроксимацию поверхности переключения по методу "сечения".
3. Составить структурную схему оптимальной системы с учетом полученной аппроксимации.
4. Снять осциллограммы с оптимальной системы (моделирование оптимальной системы провести с помощью пакета SIMULINK системы MATLAB) по выходной координате, скорости, ускорению, управлению на ступенчатое входное воздействие.
5. Построить с применением программных средств системы MATLAB проекции фазовой траектории в координатах:  ,
,  ,
,  .
.
Оформление отчета.
Отчет должен содержать:
1. Краткое пояснение метода расчета поверхности переключения.
2. Краткое пояснение метода аппроксимации и графики аппроксими-рующих функций.
3. Осциллограммы по выходной координате, скорости, ускорению, управлению на ступенчатое входное воздействие.
4. Проекции фазовой траектории в координатах: , , .
Контрольные вопросы.
1. Как рассчитывается принадлежащая поверхности переключения оптимальная полутраектория CD (рис.2)?
2. Как строятся сечения поверхности переключения, изображенные на рис. 5?
3. В чем заключается геометрический смысл функций и (стр.6)?
Библиографический список.
1. Иванов В.А., Фалдин Н.В. Теория оптимальных систем автоматического управления. - М.: Наука, 1981, 331 с.
2. Фалдин Н.В. Синтез оптимальных по быстродействию замкнутых систем управления. – Тула, ТПИ, - 1990, 100 с.








