 2018-02-13
2018-02-13 360
360ПРИБЛИЖЕННЫЙ УЧЕТ В ОПТИМАЛЬНОМ
ПО БЫСТРОДЕЙСТВИЮ БАЗОВОМ ЗАКОНЕ УПРАВЛЕНИЯ
МАЛЫХ ПОСТОЯННЫХ ВРЕМЕНИ
Цель работы: изучение способа приближенного учета в оптимальном по быстродействию базовом законе управления малых постоянных времени с помощью эквивалентного запаздывания.
Теоретические сведения.
Известно, что при синтезе оптимального по быстродействию управления объём вычислений с увеличением порядка системы катастрофически возрастает. И дело здесь, собственно, не столько в численном определении самой поверхности переключения (хотя и это сопряжено с некоторыми трудностями), сколько в обработке огромного массива чисел, дискретно задающих поверхность переключения, а также в получении подходящей аппроксимации. Для систем низкого (второго и третьего) порядков вычисление поверхности переключения и её аппроксимации обычно не составляет большого труда. В соответствии со сказанным выше для систем высокого порядка большое значение приобретают приближённые способы, приёмы и методы синтеза оптимального управления.
В настоящей лабораторной работе необходимо изучить способ синтеза оптимального по быстродействию управления, позволяющий при синтезе оптимального управления приближённо учесть влияние малых постоянных времени. От других известных в литературе методов данный выгодно отличается тем, что благодаря аппроксимации системы высокого порядка системой низкого порядка с запаздыванием он достаточно точно учитывает “вклад” малых постоянных времени в оптимальный закон управления.
В передаточных функциях технических систем можно выделить большие и малые постоянные времени. Звенья, содержащие большие постоянные времени, обычно описывают силовую часть системы, а звенья, содержащие малые постоянные времени, - управляющую часть. Будем исходить из следующего: малые постоянные времени приводят к малым изменениям в поверхности переключения.
Передаточную функцию системы, полученную из исходной путём исключения звеньев, содержащих малые постоянные времени, назовём базовой, а соответствующий ей оптимальный по быстродействию закон управления - базовым законом. Совокупность звеньев, не входящих в базовую передаточную функцию, образует систему, которую будем называть дополнительной. Способы получения базового закона управления рассмотрены выше. Остановимся на тех изменениях, которые следует внести в базовый закон управления (способы получения базового закона управления рассмотрены на лекционных занятиях), чтобы учесть влияние малых постоянных времени.
Изложение указанного подхода целесообразно начать с рассмотрения конкретного примера. При этом в целях упрощения будем предполагать, что ограничение накладывается только на управление.
На рис. 1 изображена структурная схема объекта, причём пунктиром выделена базовая передаточная функция. Пусть на управляющий параметр  наложено ограничение
наложено ограничение
 .
.
Рис. 1. Cтруктурная схема объекта
Исключив звено с малой постоянной времени, легко определить оптимальный по быстродействию закон управления. Он задаётся равенством
 , (1)
, (1)
где  - уравнение линии переключения.
- уравнение линии переключения.
Оптимальное по быстродействию управление релейно как в базовой, так и в исходной системах. Однако в исходной системе на вход базовой передаточной функции поступает координата  , которая “сглаживает” релейный сигнал
, которая “сглаживает” релейный сигнал  (рис. 2).
(рис. 2).
Рис. 2.
Так как  , то базовая система обладает существенно большей “инерционностью”, чем дополнительное звено, т.е. базовая система практически не реагирует на форму быстрых изменений координаты , а “отслеживает” их среднее значение. Это позволяет приближённо учесть влияние дополнительного звена, заменив его звеном запаздывания. На рис. 2 пунктиром изображены запаздывающие моменты переключения, компенсирующие влияние малой постоянно времени. Следует отметить, что введение запаздывания является распространённым приёмом, который используется при аппроксимации систем высокого порядка моделями низкого порядка.
, то базовая система обладает существенно большей “инерционностью”, чем дополнительное звено, т.е. базовая система практически не реагирует на форму быстрых изменений координаты , а “отслеживает” их среднее значение. Это позволяет приближённо учесть влияние дополнительного звена, заменив его звеном запаздывания. На рис. 2 пунктиром изображены запаздывающие моменты переключения, компенсирующие влияние малой постоянно времени. Следует отметить, что введение запаздывания является распространённым приёмом, который используется при аппроксимации систем высокого порядка моделями низкого порядка.
Воспользуемся известным способом синтеза систем с запаздыванием, который заключается в том, что в законе управления (1) текущие координаты  и
и  заменяются упреждёнными на запаздывание
заменяются упреждёнными на запаздывание  . Однако вместо традиционной для таких задач схемы упреждения, основанной на использовании формулы Коши решения системы линейных дифференциальных уравнений, будем использовать ряд Тейлора (траектория релейной системы не является аналитической функцией, и, строго говоря, она не может быть представлена рядом Тейлора; однако ниже будут использоваться только такие производные, которые для данной системы существуют и непрерывны). Ограничиваясь первым членом ряда Тейлора, можно записать
. Однако вместо традиционной для таких задач схемы упреждения, основанной на использовании формулы Коши решения системы линейных дифференциальных уравнений, будем использовать ряд Тейлора (траектория релейной системы не является аналитической функцией, и, строго говоря, она не может быть представлена рядом Тейлора; однако ниже будут использоваться только такие производные, которые для данной системы существуют и непрерывны). Ограничиваясь первым членом ряда Тейлора, можно записать
 ,
,
 .
.
Из передаточной функции системы следует, что
 ,
,  .
.
Заменяя в законе (1) текущие координаты на упреждённые, получим
 . (2)
. (2)
Отметим, что в закон управления (2) входят все фазовые координаты объекта. Из приведённых выше рассуждений следует, что при правильно подобранном значении запаздывания закон управления (2) достаточно точно учитывает влияние малой постоянной времени  , т.е. его можно рассматривать в качестве приближённого оптимального закона управления объектом, изображённом на рис. 1.
, т.е. его можно рассматривать в качестве приближённого оптимального закона управления объектом, изображённом на рис. 1.
Остановимся на способе определения запаздывания . Известно, что для рассматриваемого объекта поверхность переключения представляет собой совокупность идущих в начало координат оптимальных траекторий, на которых допускается одно переключение управления. С другой стороны, в релейной системе (необязательно оптимальной) движение по поверхности переключения возможно в скользящем режиме. Так как оптимальная поверхность переключения состоит из траекторий движения, то её можно рассматривать как предельную поверхность скольжения. Значение запаздывания будем выбирать так, чтобы поверхность переключения, реализующая закон управления (2), также была предельной (в рамках заданной структуры) поверхностью скольжения. Это является косвенным критерием близости поверхности переключения, входящей в закон (2), к строго оптимальной поверхности. При таком выборе траектории, порождаемые законом (2), имеют характер строго оптимальных: фазовая точка объекта сначала выводится на поверхность переключения, а затем по поверхности переключения переводится в начало координат.
В соответствии с работой [1] на поверхности переключения
 (3)
(3)
условия существования скользящего режима задаются неравенствами
 ,
,
 .
.
Выполнив дифференцирование, получим соотношения
■  ,
,
 ,□ (4)
,□ (4)
где
 . (5)
. (5)
Отметим, что неравенства (4) должны выполняться в каждой точке поверхности (3).
Так как запаздывание входит в условия существования скользящего режима (4), то для определения предельной поверхности скольжения необходимо найти такое запаздывание  , любое малое изменение которого приводит к срыву скользящего режима движения.
, любое малое изменение которого приводит к срыву скользящего режима движения.
Обозначим левую часть соотношений (4)  (для статического объекта координата также входит в условия существования скользящего режима; при определении функции её необходимо выразить из уравнения (3) через
(для статического объекта координата также входит в условия существования скользящего режима; при определении функции её необходимо выразить из уравнения (3) через  и ). Из передаточной функции объекта следует, что фазовые переменные и изменяются в пределах
и ). Из передаточной функции объекта следует, что фазовые переменные и изменяются в пределах
 ,
,  . (6)
. (6)
Область, выделяемую неравенствами (6), обозначим  . Пусть
. Пусть
 ,
,
 .
.
Нетрудно видеть, что
 .
.
Величина запаздывания , при которой поверхность (3) является предельной поверхностью скольжения, удовлетворяет уравнению
 .
.
На рис. 3 изображён график функции  при
при  ,
,  ,
,  . Так как
. Так как  в точке
в точке  , то при неравенства (4) не зависят от знака управления. Для соответствующих , , как непосредственно следует из (4) и (5), левые части соотношений (4) при любом равны нулю. Этим и объясняется наличие на графике функции участка, лежащего на
, то при неравенства (4) не зависят от знака управления. Для соответствующих , , как непосредственно следует из (4) и (5), левые части соотношений (4) при любом равны нулю. Этим и объясняется наличие на графике функции участка, лежащего на
оси .
Рис. 3.
Другой способ определения запаздывания основывается на приравнивании площадей криволинейного треугольника  и прямоугольника
и прямоугольника  (см. рис. 2). Легко убедиться, что запаздывание , если его определять указанным способом, равно . Более того, если дополнительная система состоит из
(см. рис. 2). Легко убедиться, что запаздывание , если его определять указанным способом, равно . Более того, если дополнительная система состоит из  апериодических звеньев, включённых последовательно и имеющих постоянные времени ,
апериодических звеньев, включённых последовательно и имеющих постоянные времени ,  ,
,  ,
,  , то запаздывание
, то запаздывание  . Отметим, что для рассматриваемого объекта оба способа дают примерно одинаковый результат.
. Отметим, что для рассматриваемого объекта оба способа дают примерно одинаковый результат.
На рис. 4 изображена осциллограмма отработки системой (с законом управления (2) начального рассогласования по координате . Из рисунка видно, что координата имеет два излома, что соответствует двум переключениям управления. Длительность переходного процесса при этом практически не отличается от строго оптимальной. Исследование на ЭЦВМ закона управления (2) при различных значениях постоянных времени и показывает, что указанный подход можно успешно использовать при разносе постоянных времени в пять и более раз.
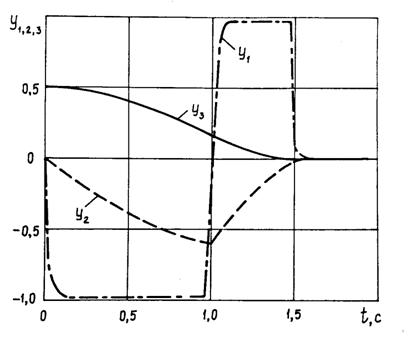 |
Рис. 4.
Изложенный на конкретном примере способ учёта при синтезе оптимального управления малых постоянных времени практически без изменений переносится на случай любой базовой передаточной функции, а также на случай любого порядка вспомогательной системы. При этом, упреждая координаты объекта, можно использовать такое число членов ряда Тейлора, которое соответствует порядку вспомогательной системы. Это позволяет включить в закон управления все фазовые координаты объекта. Если при формировании упреждения используются членов ряда Тейлора, то такое упреждение будем называть упреждением -го порядка.
На рис. 5 изображена структурная схема объекта, у которого базовая передаточная функция остаётся прежней, т.е.  ,
,  . Воспользовавшись для упреждения координат двумя членами ряда Тейлора, по аналогии с действиями, проведёнными выше, получим закон управления
. Воспользовавшись для упреждения координат двумя членами ряда Тейлора, по аналогии с действиями, проведёнными выше, получим закон управления
 (7)
(7)
Запаздывание определим рассмотренными выше способами. Необходимо только иметь в виду, что не всегда выбором можно обеспечить существование скользящего режима на всей поверхности переключения. На практике существование скользящего режима на всей поверхности переключения, вообще говоря, не требуется.
Если дополнительная система состоит из апериодических звеньев, как на рис. 5, то вместо упреждения -го порядка можно использовать упреждений первого порядка. Сначала учитывается только одно апериодическое звено. С помощью упреждения первого порядка для такой системы строится оптимальный закон управления. Этот закон затем рассматривается как базовый для новой системы, в которую включается другое апериодическое звено, и т.д.
Рис. 5.
На рис. 6 изображена осциллограмма отработки системой четвёртого порядка ( , ) начального рассогласования.
, ) начального рассогласования.
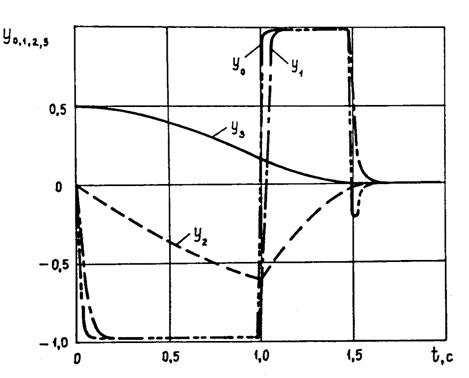 |
Рис. 6.
Оптимальный закон управления строился путём двукратного применения упреждения первого порядка. Следует отметить, что получаемый таким образом закон управления оказывается более близким к оптимальному, чем закон управления (7).
На рис. 7 изображена осциллограмма отработки начального рассогласования оптимальной системой, базовая передаточная функция которой совпадает с рассмотренной выше, а вспомогательная представляет собой колебательное звено с параметрами  ,
,  . При построении оптимального закона управления было использовано упреждение второго порядка.
. При построении оптимального закона управления было использовано упреждение второго порядка.
Рис. 7.
Если передаточная функция объекта содержит колебательное или консервативное звено, то, как известно, оптимальные траектории образуют только часть поверхности переключения. В этом случае при выборе времени запаздывания по первому способу необходимо ориентироваться именно на эту часть поверхности.
Описанный выше приём приближённого учёта малых постоянных времени может эффективно использоваться и в более сложных задачах оптимального управления, например, если требуется построить оптимальный закон управления при наличии ограничений на фазовый вектор системы или при синтезе оптимального управления для объекта с ограничителями и т. п. Необходимо, однако, иметь в виду, что в задачах с ограничениями на фазовый вектор системы указанный приём приводит к небольшому смещению граничного участка оптимальной траектории. Это может вызвать, в конечном счете, нарушение (правда, незначительное) заданных ограничений. С практической точки зрения такие нарушения вполне допустимы.
Задачи лабораторной работы.
· теоретическое изучение способа приближенного учета в базовом законе управления малых постоянных времени с помощью эквивалентного запаздывания;
· экспериментальное исследование оптимальной по быстродействию системы управления без учета и с учетом малых постоянных времени
Объект исследования.
В качестве объекта исследования рассматривается электропривод постоянного тока, структурная схема которого приведена на рис. 8.
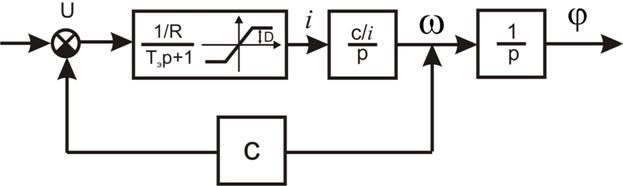
Рис. 8.
Исходные данные:
 - сопротивление обмоток,
- сопротивление обмоток,
 - момент инерции двигателя,
- момент инерции двигателя,
 - момент инерции нагрузки,
- момент инерции нагрузки,
 - передаточное число редуктора,
- передаточное число редуктора,
 - основной момент инерции, приведенный к двигателю,
- основной момент инерции, приведенный к двигателю,
 - электромеханическая постоянная электродвигателя,
- электромеханическая постоянная электродвигателя,
 - коэффициент противоЭДС,
- коэффициент противоЭДС,
 - коэффициент момента,
- коэффициент момента,
 ,
,
 .
.
Порядок выполнения работы:
Расчетная часть
1. Привести исходную структурную схему электропривода постоянного тока к структуре рис. 1. Рассчитать значения постоянных времени  и коэффициента передачи прямой цепи .
и коэффициента передачи прямой цепи .
2. Получить оптимальный закон управления для автономной системы без учета малой постоянной времени  . Для этого использовать теоретический материал для расчета линии переключения
. Для этого использовать теоретический материал для расчета линии переключения  на фазовой плоскости из лабораторной работы № 1.
на фазовой плоскости из лабораторной работы № 1.
3. Получить оптимальный закон управления для автономной системы с учетом малой постоянной времени .
4. Получить оптимальный закон управления для системы с учетом малой постоянной времени при линейно нарастающем входном сигнале  .
.








