 2018-02-13
2018-02-13 2169
2169ГЗ ЧПУ формулируется следующим образом: отобразить геометрическую информацию чертежа в совокупность таких формообразующих движений станка, которые материализуют чертеж в конечном изделии. Формообразующие движения воспроизводятся обычно следящими приводами подачи станка. Следящие приводы подачи расположены так, что они соответствуют координатной системе станка, в которой и осуществляется в процессе обработки управляемое относительное движение инструмента и заготовки. При этом координатная система должна быть такой, чтобы ГЗ ЧПУ была реализуемой. ГЗ ЧПУ реализуется с помощью управляющей программы, состоящей из кадров. Последовательная активизация кадров управляющей программы, то есть последовательная обработка содержащейся в них информации сопровождается выдачей оперативных команд на исполнительные приводы станка, приводит к последовательному обходу запрограммированного контура от одной опорной точки к следующей. Во избежание приостановки подачи на стыке двух элементарных участков, то есть в момент активизации очередного кадра, этот очередной кадр должен быть подготовлен к оперативным расчетам и отработке. Кадр, подготовленный в таком виде, называется буферным.
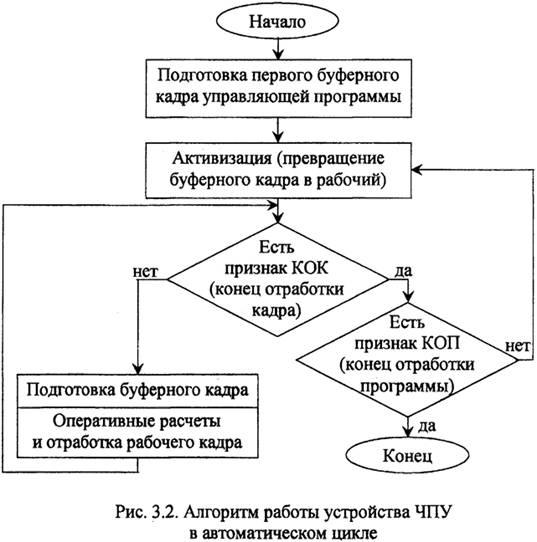
Укрупненный алгоритм работы устройства ЧПУ в автоматическом цикле показан на рис. 3.2.
Основным содержанием переработки информации в автоматическом цикле являются подготовка буферного кадра и отработка рабочего кадра Подготовка буферного кадра состоит в преобразовании информации из того вида, в котором она представлена на физическом программоносителе, или в памяти устройства ЧПУ, в тот вид, который наиболее удобен для выполнения расчетов, связанных с отработкой рабочего кадра. Любой кадр управляющей программы в конце концов становится буферным, а затем и рабочим. Информация рабочего кадра носил обобщенный характер. Она укрупнено описывает ГЗ ЧПУ (то есть ту траекторию, которую необходимо воспроизвести), но ничего не говорит о способах ее решения (то есть о том, какими должны быть команды, оперативно выдаваемые на следящие приводы подачи). Вычислительная процедура устройства ЧПУ, обеспечивающая переход от укрупненного описания заданного перемещения к оперативным командам в функции времени для исполнительных приводов, называется интерполяцией.
Интерполяция осуществляется над целыми числами, каждая единица которых соответствует наименьшему перемещению или углу поворота рабочего органа станка, контролируемым в процессе управления. Такое соответствие понимают как дискретность перемещения. Поскольку контроль перемещения на станке вдоль каждой координатной оси выполняет датчик обратной связи по положению следящего привода подачи, постольку и дискретность перемещения определяется ценой деления шкалы этого датчика. В общем случае заданное перемещение на уровне рабочего кадра представлено целым числом дискрет. Под дискретой понимается управляющая команда, поступающая на вход следящего привода подачи. Следящий привод подачи отрабатывает каждую дискрету соответственно ее цене, т.е. в виде некоторого элементарного перемещения.
При линейной интерполяции исходя из заданной скорости подачи несложно рассчитывается число управляющих дискрет, которые необходимо равномерно выдавать на приводы подачи X и Y. Однако с целью экономии затрат вычислительный процесс интерполяции на практике строится на других принципах.
Координату X, перемещение по которой часто называют ведущей, управляющие дискреты формируют так, что они поступают в привод подачи X равномерно. Выдача управляющих дискрет по ведомой координате Y разрешено лишь в моменты времени, определяемые дискретами ведущей координаты, что приводит обычно к некоторому запаздыванию по времени дискрет ведомой координаты. Теоретически неизбежно некоторое отклонение от заданной прямой линии, которое не превышает цены одной дискреты. Преимуществом является то, что вычислительный цикл интерполяции завершается одновременной выдачей управляющих команд для приводов подачи всех координат.
На практике такая интерполяция осуществляется следующим образом. В очередном вычислительном цикле, выполняемом с максимально высокой скоростью в машинном масштабе времени, определяют, в какие приводы подачи должны быть выданы дискреты на текущем этапе оперативного управления. Результат сохраняют в буфере, который опрашивают с частотой, соответствующей скорости подачи для ведущей координаты. Таким образом, расчеты максимального масштаба привязывают к реальному времени, развитие событий в котором определяется технологическими соображениями.
Возможна принципиально иная схема интерполяции - интерполяция на постоянной текущей частоте. В каждом периоде постоянной частоты и для каждой координаты в отдельности рассчитывают число дискрет, которые в этом периоде должны быть отработаны исходя из скорости подачи, заданной для привода конкретной координаты. Если результаты расчета окажутся дробными, так как часть от дискреты при управлении не имеет физического смысла, то пачки дискрет, подготовленные к выдаче в приводы подачи в определенном приводе постоянной частоты, округляют до целых чисел. При этом дробные остатки накапливают и учитывают в последующих периодах. В этой связи выдачи пакета дискрет в приводы от периода к периоду неравномерны.
Выдачи дискрет при линейной интерполяции равномерны и вычисляют достаточно просто. При круговой интерполяции частоты управляющих дискрет неравномерны и вычисляются при круговой интерполяции сложнее.
В целом интерполяционный процесс есть совокупность непрерывно повторяющихся (до полной отработки всей интерполяции кадра) вычислительных циклов, которые завершаются определением комбинации управляющих дискрет, выдаваемых на приводы или выдаваемых на приводы пачек управляющих дискрет.
Заключительный этап решения ГЗ ЧПУ состоит в отработке управляющих дискрет следящими приводами подачи в формообразующей системе координат станка. В качестве примера рассмотрим отработку управляющих координат с использованием следящего привода произвольного типа, показанного на рис. 3.3.
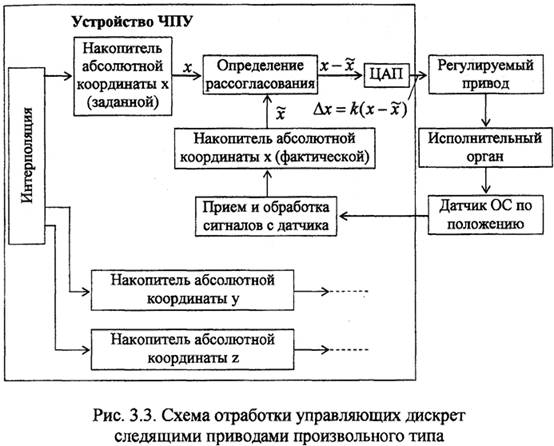
Здесь датчик обратной связи (по положению) передает прямую информацию х о перемещении исполнительного органа. Абсолютная заданная координата исполнительного органа:

где х - содержимое накопителя абсолютной координаты (заданной) в безразмерных координатах; Δх - дискретность перемещения исполнительного органа. Абсолютная фактическая координата

где  - содержимое накопителя абсолютной координаты (фактической) в безразмерных дискретах. Одна управляющая дискрета приведет к перемещению исполнительного органа на величину Δ х. Действительно, если x=1, то Δ =k(1- ). Следящий привод придет в движение, и после перемещения исполнительного органа на величину Δ х датчик обратной связи по положению сформирует сигнал =1, рассогласование Δ станет нулевым, а следящий привод остановится.
- содержимое накопителя абсолютной координаты (фактической) в безразмерных дискретах. Одна управляющая дискрета приведет к перемещению исполнительного органа на величину Δ х. Действительно, если x=1, то Δ =k(1- ). Следящий привод придет в движение, и после перемещения исполнительного органа на величину Δ х датчик обратной связи по положению сформирует сигнал =1, рассогласование Δ станет нулевым, а следящий привод остановится.
Структурная схема геометрической задачи в общей конфигурации системы ЧПУ приведена на рис. 3.4.
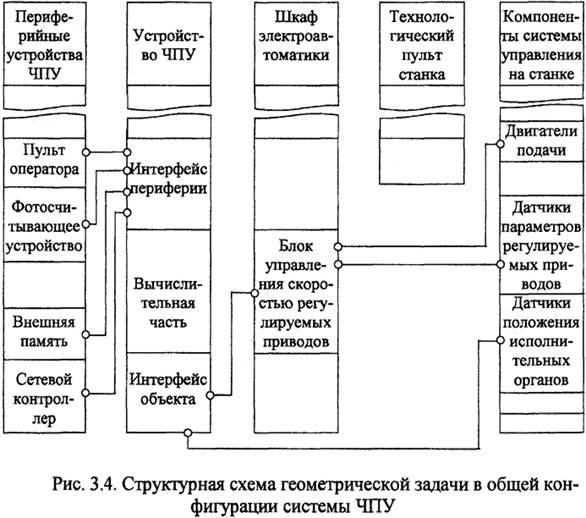
Анализируя структуру, можно установить отдельные фазы решения ГЗ ЧПУ.
Ввод управляющей программы в память устройства ЧПУ с программоносителя или по каналу связи с верхнего уровня. При размещении управляющей программы в памяти неизбежны некоторые изменения исходного текста, связанные с исключением пробелов, комментариев, непредусмотренных символов, а также синтаксический и семантический контроль.
Активизация управляющей программы в автоматическом режиме и вовлечение ее информации в процесс вычислений. Здесь важную роль играет подготовка буферного кадра, поскольку исходные тексты управляющей программы не содержат в явном виде всей информации, необходимой для траекторных расчетов. Подготовка буферного кадра включает расчеты эквидистант, преобразования координатных систем, определение данных, используемых алгоритмами интерполяции.
Интерполяция. Алгоритмы интерполяции обслуживают тот кадр управляющей программы, который является в данный момент рабочим. Интерполяционные вычислительные циклы воспроизводятся с высокой частотой, чтобы получить информацию, необходимую для оперативного управления следящими приводами подачи с целью движения по заданной траектории. Задача интерполяции состоит в управлении каждым отдельным приводом подачи, а также в согласовании приводов подачи между собой.
Сложность ГЗ ЧПУ определяется программным наполнением ее фаз: уровнем начального контроля исходных текстов; степенью автоматизации подготовительных траекторных расчетов; возможностями вмешательства оператора в процесс автоматического управления; числом алгоритмов интерполяции и богатством этих алгоритмов; числом управляемых координат; возможностями настройки и коррекции следящих приводов.








