 2018-02-13
2018-02-13 1349
1349
[6.3.1]
ВЫБОР
Векторная сумма моментов всех сил системы равна …
в- главному вектору системы сил
в- моменту равнодействующей силы
в- равнодействующей системы сил
в+ главному моменту системы сил
[6.3.2]
ВЫБОР
Главный вектор системы сил определяется по формуле...
в- 
в- 
в- 
в+ 
[6.3.3]
ВЫБОР
Главный момент системы сил определяется по формуле...
в- 
в- 
в-
в+
[6.3.4]
ВЫБОР
Векторная сумма всех сил системы равна … этой системы сил
в- равнодействующей
в- моменту равнодействующей
в- главному моменту
в+ главному вектору
[6.3.5]
ВЫБОР
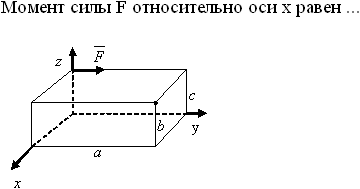
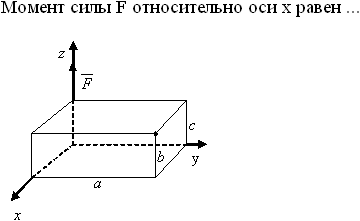
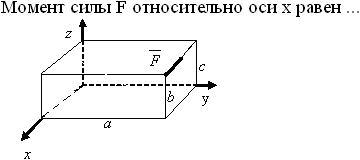
Момент силы F относительно оси x равен …
в- 
в- 
в- 
в- 
в- 
в+ 
[6.3.6]
ВЫБОР
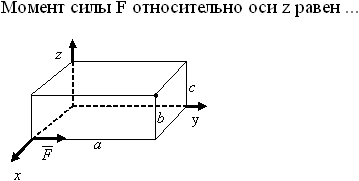
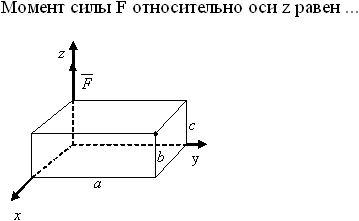
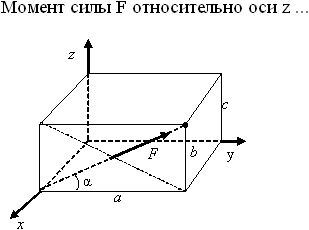
Момент силы F относительно оси z равен …

в-
в-
в-
в- 0
в-
в- 
в+
[6.3.7]
ВЫБОР
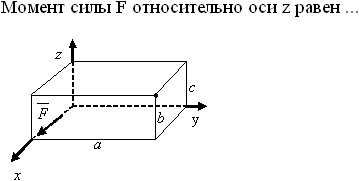
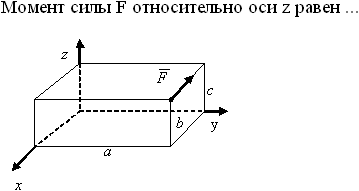
Момент силы F относительно оси z равен …

в-
в-
в-
в-
в-
в+
[6.3.8]
ВЫБОР
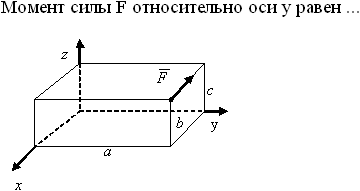
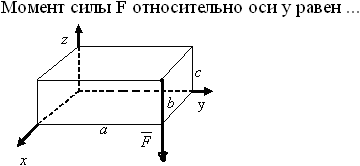
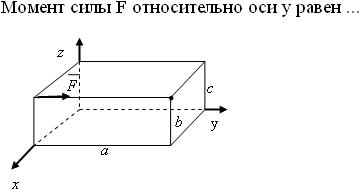
Момент силы F относительно оси y равен …

в-
в-
в-
в- 0
в-
в-
в+
[6.3.9]
ВЫБОР
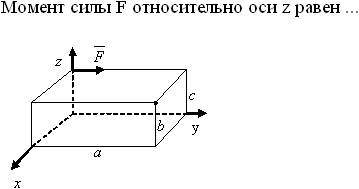
Момент силы F относительно оси z равен …
в-
в-
в-
в-
в-
в-
в+
[6.3.10]
ВЫБОР
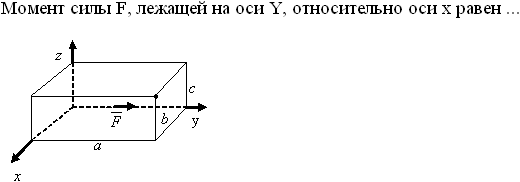
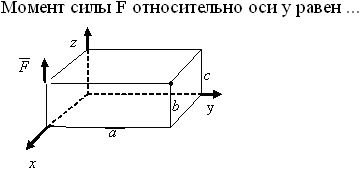
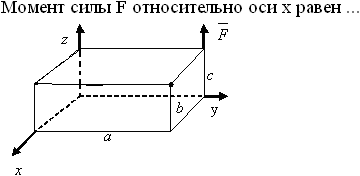
Момент силы F относительно оси x равен …
в-
в-
в-
в-
в-
в-
в+ 0
[6.3.11]
ВЫБОР
Момент силы F относительно оси z равен …
в-
в-
в-
в-
в-
в-
в+ 0
[6.3.12]
ВЫБОР
Момент силы F относительно оси y равен …

в-
в-
в-
в-
в-
в-
в+ 0
[6.3.13]
ВЫБОР
Момент силы F относительно оси z равен …
в-
в-
в-
в-
в-
в-
в+ 0
[6.3.14]
ВЫБОР
Момент силы F относительно оси z равен …
в-
в-
в-
в-
в-
в-
в+ 0
[6.3.15]
ВЫБОР
Момент силы F относительно оси y равен …

в-
в-
в-
в-
в-
в-
в+ 0
[6.3.16]
ВЫБОР
Момент силы F относительно оси x равен …

в-
в-
в-
в-
в-
в-
в+ 0
[6.3.17]
ВЫБОР
Момент силы F относительно оси z равен …
в-
в-
в-
в-
в-
в+
[6.3.18]
ВЫБОР
Момент силы F относительно оси x равен …

в-
в-
в-
в-
в-
в+ 0
[6.3.19]
ВЫБОР
Момент силы F относительно оси y равен …
в-
в-
в-
в-
в-
в+
[6.3.20]
ВЫБОР
Момент силы F относительно оси x равен …
в-
в-
в-
в-
в-
в-
в+ 0
[6.3.21]
ВЫБОР
Момент силы F относительно оси x равен …

в- 
в- 
в- 0
в- 
в+ 
[6.3.22]
ВЫБОР
Проекция главного момента системы сил на ось z равна …

в- 
в- 
в- 
в- 
в+ 
[6.3.23]
ВЫБОР
Момент силы F относительно оси z равен …
в-
в- 
в- 0
в-
в+ 
[6.3.24]
ВЫБОР
Момент силы F относительно оси у равен …

в-
в-
в- 0
в-
в+
[6.3.25]
ВЫБОР
Момент силы F относительно оси x равен …

в-
в-
в- 
в-
в+ 0
[6.3.26]
ВЫБОР
Момент силы F относительно оси y равен …
в-
в-
в-
в- 0
в-
в-
в+
[6.3.27]
ВЫБОР
Момент силы F относительно оси y равен …
в-
в-
в-
в- 0
в-
в-
в+
[6.3.28]
ВЫБОР
Момент силы F относительно оси z равен …

в-
в-
в-
в- 0
в-
в-
в+
[6.3.29]
ВЫБОР
Момент силы F относительно оси x равен …
в-
в-
в-
в-
в-
в-
в+ 0
[6.3.30]
ВЫБОР
Момент силы F относительно оси x равен …
в-
в-
в-
в-
в-
в+
[6.3.31]
ВЫБОР
Момент силы F относительно оси y равен …
в-
в-
в-
в-
в-
в+ 0
[6.3.32]
ВЫБОР
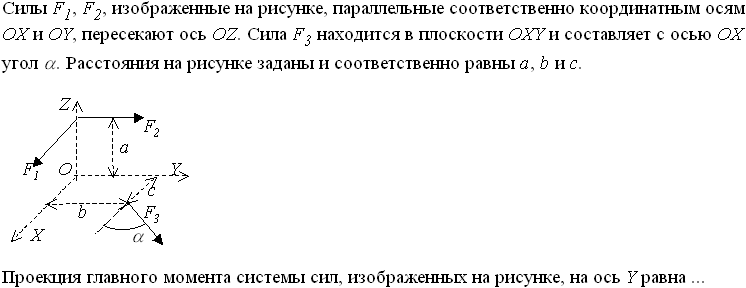
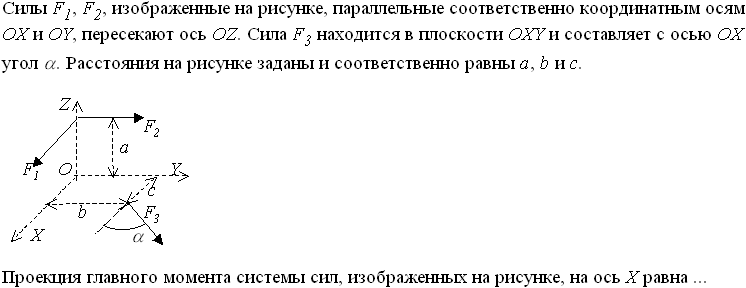
Силы F1, F2 изображенные на рисунке, параллельные соответственно координатным осям OX и OY, пересекают ось OZ. Сила F3 находиться в плоскости OXY и составляет с осью OX угол α. Расстояния на рисунке заданы и соответственно равны a, b и с. Проекция главного момента системы сил, изображенных на рисунке, на ось Y равна …
в- 
в- 
в- 
в+ 
[6.3.33]
ВЫБОР
Силы F1, F2 изображенные на рисунке, параллельные соответственно координатным осям OX и OY, пересекают ось OZ. Сила F3 находиться в плоскости OXY и составляет с осью OX угол α. Расстояния на рисунке заданы и соответственно равны a, b и с. Проекция главного момента системы сил, изображенных на рисунке, на ось X равна …
в- 
в- 
в- 
в+ 
[6.3.34]
ВЫБОР
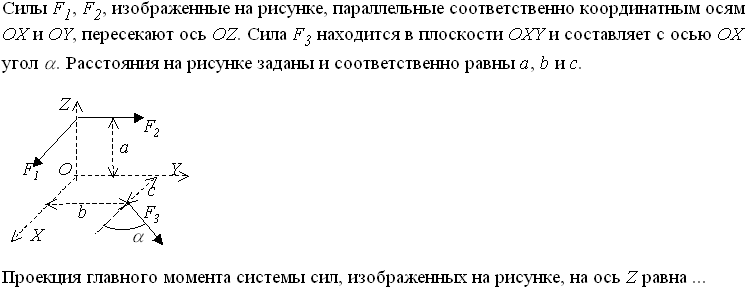
Силы F1, F2 изображенные на рисунке, параллельные соответственно координатным осям OX и OY, пересекают ось OZ. Сила F3 находиться в плоскости OXY и составляет с осью OX угол α. Расстояния на рисунке заданы и соответственно равны a, b и с. Проекция главного момента системы сил, изображенных на рисунке, на ось Z равна …
в- 
в- 
в- 
в+ 
[6.3.35]
ВЫБОР
Инвариантом системы сил являет(ют)ся...
в- главный вектор-момент
в- главный вектор-момент и главный вектор
в- количество сил, составляющих систему
в+ главный вектор
[6.3.36]
ВЫБОР
Главный вектор и главный момент относительно некоторого центра системы сил равны нулю, значит эта система сил...
в- имеет равнодействующую, отличную от нуля
в- эквивалентна динамическому винту, отличному от нуля
в- эквивалентна паре сил с моментом отличным от нуля
в+ находится в равновесии
[6.3.37]
ВЫБОР
При приведении силы к заданному центру, надо добавлять к телу пару сил с моментом, равным моменту силы относительно...
в- старой точки её приложения
в- любой точки, лежащей на её линии действия
в- центра тяжести тела
в+ новой точки её приложения
[6.3.38]
ВЫБОР
«Произвольная система сил может быть заменена одной силой и парой сил». Эта теорема называется:
в- Теорема Вариньона
в- Теорема Пуассона
в- Теорема Штейнера
в+ Основная теорема статики
в+ Теорема Пуансо
[6.3.39]
ВЫБОР
Результатом приведения произвольной системы сил к заданному центру О будет (основная теорема статики):
в- 
в- пара сил
в+ сила и пара сил
в+ главный вектор и главный момент
[6.3.40]
ВЫБОР
Система сил находится в равновесии. Для этого необходимо и достаточно, чтобы...
в- главный вектор системы равнялся нулю
в- главный момент системы равнялся нулю
в- главный вектор и главный момент системы были параллельны
в+ главный вектор и главный момент системы равнялись нулю
[6.3.41]
ВЫБОР
Условия равновесия пространственной системы параллельных сил...
в- 
в- 
в- 
в+ 
[6.3.42]
ВЫБОР
Главный вектор равен нулю и главный момент не равен нулю, значит система сил...
в- эквивалентна динамическому винту
в- уравновешена
в- имеет равнодействующую
в+ эквивалентна паре сил
[6.3.43]
ВЫБОР
Система сил, которой соответствуют данные условия равновесия …

в- плоская сходящаяся
в- произвольная плоская
в- пространственная сходящаяся
в- плоская система параллельных сил
в- произвольная пространственная
в+ пространственная система параллельных сил
[6.3.44]
ВЫБОР
Система сил эквивалентна паре сил, значит при приведении к некоторому центру...
в- главный момент равен нулю, а главный вектор не равен нулю
в- главный вектор параллелен главному момент
в- главный вектор перпендикулярен главному момент
в+ главный вектор равен нулю, а главный момент не равен нулю
[6.3.45]
ВЫБОР
Условия равновесия произвольной пространственной системы сил...
в-
в-
в-
в+








