 2018-02-20
2018-02-20 1894
1894
Все многообразие индикаторов можно разделить на две группы: активные и пассивные. В активных электрическая энергия преобразуется в световую (электролюминесценция, светоизлучающие процессы в п/п); в пассивных световой поток моделируется под действием электрического поля и тока (оптические эффекты в жидких кристаллах).
Индикаторы можно подразделить по принципу формирования изображения: знакомоделирующие (ЗМИ) и знакосинтезирующие (ЗСИ). Вариант ЗМИ – газоразрядный индикатор (цифры 0-9). Любое другое изображение получить невозможно. В ЗСИ изображение получается с помощью мозаики независимо управляемых элементов индикации, каждый из которых является преобразователем сигнал – свет.
Среди ЗСИ различают сигнальные индикаторы, объединенные в единый элемент – одноразрядный ЗСИ; многоразрядные ЗСИ – несколько знакомест; матричные ЗСИ; цифровые ЗСИ; буквенные ЗСИ; буквенно-цифровые ЗСИ; ЗСИ специальных знаков и т.д.
16.1.1.ОСНОВНЫЕ ПАРАМЕТРЫ
Яркость индикатора Lu – среднее по площади значение яркости всех элементов индикации;
- контрастность Lu/Lф, где Lф – яркость собственного фона индикатора (определяется светящейся поверхностью, окружающей включенный элемент);
- светоотдача – отношение светового потока ЗСИ к мощности, затрачиваемой на возбуждение излучения;
- амплитудная характеристика – зависимость полезного выходного эффекта от воздействия на его вход;
- АЧХ – зависимость эффективности излучения от частоты входного сигнала; АЧХ характеризует инерционные свойства индикатора (время реакции и релаксации);
- цвет – характеризуется световой характеристикой;
- конструктивные особенности – число сегментов, знакомест и т.д.
16.1.2.СИСТЕМЫ УПРАВЛЕНИЯ ИНФОРМАЦИЕЙ
Существует два основных режима работы индикаторов – статическая и динамическая индикация. В режиме статической индикации всеми элементами отображения управляют одновременно и выключают их только при смене информации. При динамической индикации отдельные элементы отображения включаются поочередно в течение определенного времени, которое называют кадром. В этом случае скважность управляющих импульсов обратно пропорциональна числу элементов отображения. Использование динамической индикации позволяет значительно повысить эффективность индикаторов (упрощенные схемы управления и снижения потребляемой энергии).
 Существует две системы соединения отдельных элементов отображения в индикаторе – однокоординатная система (или адресация) и матричная система. В первом случае каждый элемент отображения имеет два независимых входа. Независимость входов позволяет организовать статическую индикацию. С другой стороны при такой адресации число
Существует две системы соединения отдельных элементов отображения в индикаторе – однокоординатная система (или адресация) и матричная система. В первом случае каждый элемент отображения имеет два независимых входа. Независимость входов позволяет организовать статическую индикацию. С другой стороны при такой адресации число
Рис. 16.1 каналов управления равно числу элементов
отображения. На практике это приводит к тому, что у индикатора будут десятки выводов. Потому такая адресация использует для индикаторов от 1 до 4 разрядных.
 Применение матричной адресации позволяет уменьшить число выводов индикатора nвыв. и следовательно каналов управления nвыв.мат. = 2
Применение матричной адресации позволяет уменьшить число выводов индикатора nвыв. и следовательно каналов управления nвыв.мат. = 2  , где nэо–число элементов отображения (результат округления до большего целого). В этом случае элементы отображения объединяют в строки и в столбцы. Элементы отображения включаются, когда сумма сигналов на его входах превысит заданный поро-
, где nэо–число элементов отображения (результат округления до большего целого). В этом случае элементы отображения объединяют в строки и в столбцы. Элементы отображения включаются, когда сумма сигналов на его входах превысит заданный поро-
Рис. 16.2 говый уровень.
16.2. ВАКУУМНЫЕ ЛЮМИНИСЦЕНТНЫЕ ИНДИКАТОРЫ (ВЛИ)
16.2.1. ПРИНЦИП ДЕЙСТВИЯ
Вакуумные люминесцентные индикаторы относятся к активным индикаторам; обладают большой яркостью и долговечностью. Недостаток – необходим источник питания для накала индикатора.
Конструктивно ВЛИ представляет собой вакуумный триод, содержащий прямонакальный катод, сетку и несколько анодов, покрытых люминофором, расположенных в одной плоскости и заключенных в одном стеклянном баллоне. Катод – отрезок вольфрамовой проволоки, покрытый слоем оксида щелочноземельного металла.
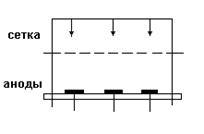 При подаче напряжения накала катод испускает электроны, которые под действием полей сетки и анодов устремляется к анодам. Люминофор анодов начинает светиться. При анодном напряжении 20-30В цвет сине-зеленый. Аноды-сегменты выполнены либо в виде точек, либо в виде отрезков различной формы.
При подаче напряжения накала катод испускает электроны, которые под действием полей сетки и анодов устремляется к анодам. Люминофор анодов начинает светиться. При анодном напряжении 20-30В цвет сине-зеленый. Аноды-сегменты выполнены либо в виде точек, либо в виде отрезков различной формы.
Рис. 16.3
Количество, конфигурация и взаимное расположение сегментов образует структурный рисунок индикатора.
У многоразрядных индикаторов одноименные аноды соединяются внутри баллона параллельно, что позволяет резко сократить число выводов.
Пример: ИВ-27 – 14 разрядный индикатор (14 семисегментных цифр) имеет 24 вывода, – 2 вывода накал, 14 – сеток и 8 – анодов.
 При раздельном выводе всех анодов получится 128 выходов.
При раздельном выводе всех анодов получится 128 выходов.
Рис. 16.4
Конструктивные модификации:
– одноразрядные буквенно-цифровые: ИВ-1,ИВ-3,ИВ-6,ИВ-8 и т.д. (отличаются размерами и формой анодов);

Рис. 16.5
– многоразрядные или дисплейные индикаторы (6.9,12,14,17 разрядные) в цилиндрических и плоских баллонах (ИВ-21,ИВ-27)(ИВ-28,ИВЛ1-7,5);
– шкальные индикаторы: ИВЛШ1-8/13;
– матричные дисплейные индикаторы (одно, двух и трех цветные): ИВЛМ3-5/7.
16.2.2. СХЕМЫ УПРАВЛЕНИЯ ВЛИ
Статическая схема управления

Рис. 16.6
161ПР2 – преобразователь двоичного кода в семисигментный.
Для многоразрядного режима дополнительно используется вход С преобразователя для переключения отдельных индикаторов, и дополнительно, на каждый индикатор требуется свой преобразователь.

Рис. 16.7
Если же преобразователь не имеет дополнительного входа синхронизации, то необходимы еще и счетчики на каждый разряд.
Из схемы следует, что динамическая индикация значительно снижает аппаратные затраты. Основные параметры ВЛИ:
– размер знаков,
– число сегментов,
– U накала; U сетки,
– U анод-катод,
– ток накала,
– ток сетки,
– ток анод-катод,
– скважность – частота смены информации.
16.3. ПОЛУПРОВОДНИКОВЫЕ ЗСИ
Полупроводниковые ЗСИ – это активные индикаторы. Полупроводниковые ЗСИ – низковольтные приборы удобно совмещаемые с уровнями напряжений и токов различных типов ИМС. Они миниатюрны и позволяют создавать устройства отображения информации от светящейся точки до текстов и графиков. Различают единичные полупроводниковые ЗСИ и многоэлементные. Единичные – это простой световой диод (АЛ102, АЛ307 и т.д.). Многоэлементные полупроводниковые ЗСИ выпускаются в виде знаковых, шкальных, экранных (матричных) и т.д.
Знаковые конструкции бывают 4 типов:

I – семисегментный АЛ305,
II – девятисегментный  АЛС323А,
АЛС323А,

III – 35-сегментный АЛ306 матричный,

IV – пятисегментный АЛ317А.
Существуют различные конструктивные варианты. Один из них – гибридный индикатор, где несколько одноразрядных объединены в один корпус с параллельным объединением одноименных символов (для реализации динамической индикации).
Полупроводниковые ЗСИ имеют очень высокую долговечность в облегченных режимах (на предельно малых токах) до 30000ч - наработка на отказ и более.
16.3.1. СХЕМЫ ВКЛЮЧЕНИЯ ПОЛУПРОВОДНИКОВЫХ ЗСИ
Схемы подключения единичных светодиодов к логическим элементам:

Рис. 16.8
Схема включения семисегментного полупроводниковые ЗСИ (разновидности с общим анодом или общим катодом).

Рис. 16.9
При подключении к КМДП ИМС, можно убрать транзисторы, т.к. МДП транзистор с индуцированным каналом выполняют роль токовых ключей.
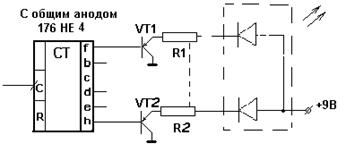
Рис. 16.10
Обе схемы в режиме статической индикации.
Для динамической индикации используются аналоговые ВЛИ схемы.
Основные параметры полупроводниковые ЗСИ: конфигурация, яркость, постоянное Uпр, прямой максимальный ток, Uобр.доп.
16.3.2. ЖИДКОКРИСТАЛЛИЧЕСКИЕ ИНДИКАТОРЫ (ЖКИ)
ЖКИ являются пассивными индикаторами, преобразующими падающий на них свет. Их достоинства:
– низкая потребляемая мощность,
– низкие рабочие напряжения (1,5-5В),
– хорошая совместимость с КМОП ИМС,
– удобное конструктивное исполнение,
– плоский экран (толщина до 0,6мм),
– долговечность 10-12 лет непрерывной работы.
Недостатки:
– низкое быстродействие,
– ограниченный угол обзора,
– необходимость внешнего освещения.
Жидкие кристаллы (ЖК) имеют и другое название – анизотропные жидкости, электрические и оптические свойства, которых зависят от направления их наблюдения. Плотность ЖК близка к плотности воды. ЖК – диамагнитный материал, относятся к диэлектрикам. Теплопроводность ЖК в направлении вдоль молекул отличается от теплопроводности в поперечном направлении.
Вследствие анизотропии электрических и оптических свойств в ЖК наблюдаются электрооптические эффекты:
– динамическое рассеяние (ДР) – (при движении вещества),
– твист-эффект (поворот молекул в электрическом поле),
– эффект – “гость-хозяин”.
Конструктивно ЖКИ имеет вид:
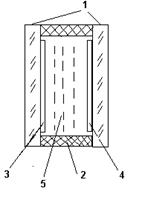 1 – стеклянные пластины,
1 – стеклянные пластины,
2 – склеивающее соединение,
3 – передний прозрачный электрод,
4 – задний электрод, прозрачный для работы на просвет; зеркальный, отражающий при работе на отражении,
5 – ЖК.
Рис. 16.11
Передние электроды – прозрачные токопроводящие пленки.
Конфигурация электродов определяется либо формой исходных стеклянных пластин, либо технологией металлизации. Электроды плоские.
В ЖКИ на ДР при приложении электрического поля молекулы переориентируются, наблюдается сильное оптическое рассеяние. Материал прозрачный в отсутствие поля становится непрозрачным. В ЖКИ на ТЭ вводятся поляризаторы, которые управляют ориентацией молекул. В отсутствие электрического поля свет проходит через индикатор. При наличии электрического поля ориентация молекул изменяется, плоскость поляризации света, проходящего через индикатор, не вращается и свет не проходит через индикатор, а отражается (на сером фоне – темные знаки).
В ЖКИ на ТЭ, работающих на просвет, поляризаторы устанавливают так, чтобы их плоскости поляризации были параллельны друг другу. Индикатор не пропускает свет в отсутствие электрического поля.
В ЖК на эффекте «гость-хозяин» слой ЖК «хозяина» взаимодействует с молекулами «гостя». При отсутствии электрического поля ЖК «хозяина» за счет поглощения света приобретает окрас «гостя». Под действием электрического поля он обесцвечивается.
ЖКИ, предназначенные для работы в условиях низкой освещенности работают с подсветкой.
16.3.3. УПРАВЛЕНИЕ ЖКИ
Существует несколько способов управления панелями ЖКИ. Предпочтительным является возбуждение ЖКИ переменным током, что значительно повышает долговечность. В этом случае на электроды передней и задней пластин подаются импульсы прямоугольной формы одинаковой полярности, но сдвинутые по фазе на 180 градусов.
 Для ЖКИ характерна заметная инерционность при возбуждении и снятии возбуждения. Элемент включается с запаздыванием на 10-20мсек (время реакции), а время релаксации на порядок больше.
Для ЖКИ характерна заметная инерционность при возбуждении и снятии возбуждения. Элемент включается с запаздыванием на 10-20мсек (время реакции), а время релаксации на порядок больше.
Для уменьшения времени релаксации после возбуждения на элемент подают переменный сигнал частотой 10-40 кГц, что уменьшает время релаксации до 5-10 мсек.
Рис. 16.12
Существует два способа управления ЖКИ: частотный и фазовый.
Схема частотного метода управления (схема управления одним элементом).

Рис. 16.13
В фазовом методе вместо F индекс воздушной и F индекс гашенной подаются сигналы одной частоты, но сдвинутые на 180 градусов. Однако в этом случае не удается снизить время релаксации.
Основные параметры:
– конфигурация;
– упр. напряжения от 1,5В – 20В;
– ток индикатора от 1,5 – 100 мкА;
– время реакции;
– время релаксации;
– частота управления напряжением.
 Обозначение.
Обозначение.
ЦИЖ – 2,4
ИЖКЦ1 – 4/7
и т.д.
Рис. 16.14
17. Сигналы и помехи
17.1. Модели сигналов
Переменные ток и напряжение называются электрическими колебаниями и описываются функцией времени S(t). Колебание, отображающее передаваемое сообщение или информацию о состоянии исследуемого объекта, называется сигналом. Колебание, мешающее принять сигнал или измерить состояние объекта, называется помехой.
С помощью преобразователей, установленных на источнике сообщения, получается первичный сигнал. В некоторых случаях такой сигнал непосредственно передается по линии связи. Так обстоит дело в городских телефонных системах. Для передачи на большие расстояния первичный сигнал с помощью модуляторов преобразуется в высокочастотный радиосигнал.
Если функция S(t), описывающая сигнал, может принимать только дискретные значения Sn (например, 1 и 0), то сигнал называют дискретным по состояниям, например сигналы систем передачи данных. Если функция S(t) может принимать любые значения, то сигнал называют непрерывным по состояниям или аналоговым, например сигналы систем передачи речевой информации.
В некоторых случаях сигнал задается не на всей оси времени, а только в определенные моменты tn. Такие сигналы называют дискретными во времени в отличие от непрерывных во времени. Сигналы, дискретные во времени и по состояниям, называют цифровыми.
Современные методы преобразования сигналов позволяют непрерывные сигналы представлять эквивалентными дискретными и, наоборот, дискретные - непрерывными.
Электрические колебания могут быть случайные и детерминированные. Случай ным или нерегулярным называют колебание, функция времени S(t) которого неизвестна и непредсказуема. Случайные колебания анализируются вероятностными методами. Детерминированным или регулярным называют колебание, функция S(t) известна. Будущие знания детерминированного колебания могут быть предсказаны.
Так как все значения детерминированного колебания заранее известны, то такое колебание для наблюдателя не несет информации. Следовательно, сигналы – это случайные колебания. Помехи также случайные колебания, так как мешающее действие известного колебания легко устранить.
Конкретное колебание является детерминированным для наблюдателя, который знает функцию S(t), а для другого наблюдателя, который функции S(t) не знает, - случайным. Аналогично сигнал для одного наблюдателя может стать помехой для другого.
Детерминированные электрические колебания применяются как переносчики энергии в устройствах питания, как управляющие сигналы в различных устройствах управления и преобразователях спектра, как испытательные сигналы в устройствах выделения информации. В последнем случае на вход исследуемого объекта подается детерминированное колебание, а изменение параметров колебания, прошедшего через объект, дает информацию о его состоянии. Это используется при разработке методов анализа радиотехнических цепей и устройств. Поэтому сначала изучают именно детерминированные колебания.
Детерминированные колебания делятся на периодические и непериодические. Периодическим считается такое колебание, которое повторяется через одинаковые промежутки времени: s(t)=s(t+T). Здесь T – период колебания. Простейшими периодическими колебаниями являются гармонические.
Все колебания конечной длительности, в частности импульсные, а также некоторые, имеющие неограниченную длительность, относятся к числу непериодических.
17.1.1. Гармонические колебания и их представление
Электрическое колебание, которое описывается гармоническими (косинусоидальной и синусоидальной) функциями времени, называются гармоническим. Такое колебание (рис. 17.1) можно записать, используя, например, функцию косинуса.
 . (1)
. (1)

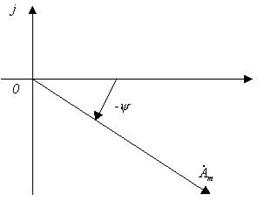 Здесь Аm – амплитуда;
Здесь Аm – амплитуда;  - фаза, которую в момент времени (t=0) называют начальной:
- фаза, которую в момент времени (t=0) называют начальной:  .
.
Рис. 17.1 Рис. 17.2
Продолжительность периода колебания Т выражают в секундах. Число периодов за секунду называют частотой колебания f=1/T и выражают в герцах. Величину  называют угловой частотой и выражают в радианах в секунду.
называют угловой частотой и выражают в радианах в секунду.
Гармонические колебания в радиоэлектронике занимает исключительное место благодаря:
- простоте технической реализации генераторов,
- минимальной полосе частот, занимаемой гармоническим колебанием (когда частота f строго постоянна, полоса частот бесконечно мала),
- неизменности формы гармонических колебаний при прохождении через линейную цепь с постоянными параметрами (меняются только амплитуда и начальная фаза).
Из выражения (1) видно, что гармоническое колебание полностью характеризуется двумя величинами: амплитудой Аm и фазой q. Как известно, аналогичными величинами определяется положение вектора на плоскости. Используя эту аналогию, гармоническое колебание можно условно изображать вектором на плоскости. Так как фаза q в течение времени меняется, то вектор, изображающий колебания, вращается с постоянной угловой скоростью w. При анализе электрической цепи, находящейся под воздействием источников гармонических ЭДС с одинаковыми частотами токи и напряжения в цепи, удобнее изображать неподвижными векторами. При этом длина вектора принимается равной амплитуде колебания, а угол поворота – начальной фазе (рис. 17.2).
Наряду с векторным представлением гармонические колебания можно представить комплексными числами.








