 2020-01-14
2020-01-14 132
132
Одной из распространенных форм математического описания линейных динамических систем являются уравнения следующего вида:
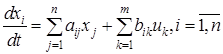 ;
; 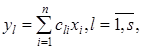 (3.1)
(3.1)
Это название связано с тем, что при uk = 0 достаточно задать начальное значение переменных xi, чтобы однозначно определить состояние системы xi(t), y1 для любого момента времени. Модель (3.1) содержит n дифференциальных уравнений 1-го порядка с k управляющими входными воздействиями, а также s алгебраических соотношений для связи выходных переменных системы y с переменными состояния x. Коэффициенты aij, bik, cli называют параметрами модели.
Уравнения (3.1) удобно представить в матричной форме
 (3.2)
(3.2)
где X - вектор переменных состояния; U − вектор управляющих (входных) воздействий; Y - вектор выходов; A, B, C − матрицы параметров [2].
Модель (3.2), в сравнении с ранее рассмотренными моделями, формирует дополнительно n переменных внутреннего состояния системы, что увеличивает количество информации об объекте управления.
При этом начальные условия согласуют следующим образом:
 (3.7)
(3.7)
Структурная схема объекта с учетом полученных передаточных функций:
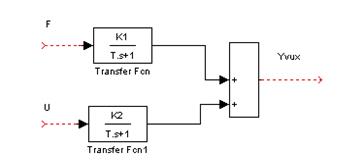
Рисунок 3.1-Структурная схема объекта
Тогда вектор переменных состояния объекта в отклонениях от желаемых базовых значений примет вид:
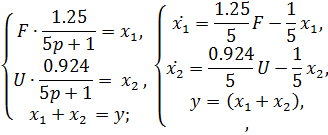
На основе полученных дифференциальных уравнений запишем матрицы А, B и S.








