 2020-01-15
2020-01-15 125
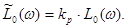
125Желаемая ЛАЧХ строится по требованиям к качеству работы замкнутой системы в статике и динамике. Для удобства построения ЛАЧХ регулятора предлагается выровнять ЛАЧХ объекта и желаемую ЛАЧХ. При этом строится измененная характеристика объекта с учетом коэффициента регулятора (k р), найденного из условий статики:
 (3.6)
(3.6)
Это позволяет при построении желаемой ЛАЧХ ориентироваться только на требования динамики ( ).
).
Наибольшее влияние на свойства замкнутой системы оказывает средне частотная асимптота желаемой ЛАЧХ, которую выбирают по условиям динамики. Для того, чтобы обеспечить требуемые свойства, ее наклон всегда должен быть равен -20 дБ/дек.
Частота среза  выбирается по заданному быстродействию замкнутой системы:
выбирается по заданному быстродействию замкнутой системы:
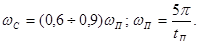
Выберем ωс = 1 с-1, lg ωс=lg1=0 дек.
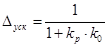
Длина среднечастотного участка желаемой ЛАЧХ ограничивается запасом устойчивости по модулю  дБ, который откладывается вверх и вниз по оси ординат (
дБ, который откладывается вверх и вниз по оси ординат ( находим по номограммам в зависимости от требуемого перерегулирования).
находим по номограммам в зависимости от требуемого перерегулирования).
В области низких частот желаемая ЛАЧХ совпадает с ЛАЧХ объекта; в области высоких частот эти две характеристики параллельны.
Для удобства построения ЛАЧХ регулятора предлагается выровнять ЛАЧХ объекта и желаемую ЛАЧХ. При этом строится измененная характеристика объекта с учетом коэффициента регулятора (k р), найденного из условий статики:
(3.7)
Для расчета  , задается относительная ошибка по ускорению
, задается относительная ошибка по ускорению  . И из выражения
. И из выражения
 (3.8)
(3.8)
определяется значение  .
.








