 2020-01-14
2020-01-14 180
180Механизмом называется такая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья совершают однозначно определяемые движения.
Звено – одно тело или несколько тел жестко соединенных между собой.
Кинематическая пара – соединение 2-x звеньев допускающее их относительное движение.
Изобразим на схематически механизм и обозначим на схеме звенья и кинематические пары.

Рис. 1.2.1. Схема механизма
Данный механизм является плоским. Плоскими называются кинематические цепи, точки звеньев которых описывают траектории в одной плоскости, или в параллельных плоскостях.
Так как механизм плоский, то число степеней свобод определяем по формуле Чебышева:
W=3n-2p5-p4 с. 28 [1]
где n=5 – число подвижных звеньев;
p5=7 – число одноподвижных звеньев;
p4=0 – число двухподвижных звеньев;
w=3*5-2*7-1*0=1
Степень свободы равна единице, следовательно, механизм имеет одно входящее звено.
Строим заменяющую схему механизма, для чего:
- ползуны, кулисные камни заменяем рычагами
- поступательные пары заменим вращательными
- звенья, соединенные с тремя другими изобразим в виде треугольного контура.
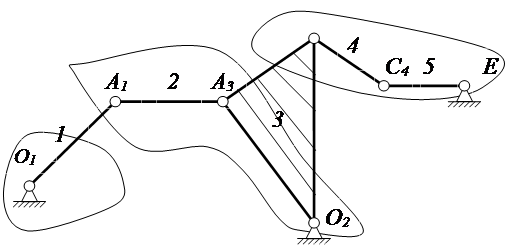
Рис. 1.2.2. Заменяющая схема механизма
Разобьем механизм на структурные группы, запишем структурную формулу механизма и определим его класс и порядок:
I(0;1),II(2;3),II(4;5)=II2 (механизм 2 класса, 2 порядка)
Рассмотрим каждую структурную группу в отдельности, определив степень свободы для каждой из них:









