 2020-01-14
2020-01-14 677
677
Под машинным агрегатом понимается совокупность механизмов двигателя, передаточных механизмов и механизмов рабочей машины.
Для определения приведенной силы сопротивления необходимо весь машинный агрегат заменить динамической моделью:
 |
Рис. 1.7.1. Схема привода машинного агрегата
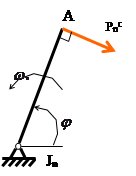 |
Рис. 1.7.2. Динамическая модель
Приведенная сила (Pnc) – сила, условно приложенная к точке приведения, работа которой на нее элементарном перемещении равна сумме работ всех сил и пар сил, действующих на звенья механизма.
Приведенный момент инерции – это есть момент инерции вращающегося тела вместе со звеном АО1 тела, кинетическая энергия которого в каждом рассматриваемом положении механизма равна сумме кинетических энергий всех его звеньев.
Приведенные моменты инерции  машинного агрегата могут быть или постоянными, или зависящими от положения начального звена. В данном случае (долбежный станок) инерции зависит от угла поворота j начального звена.
машинного агрегата могут быть или постоянными, или зависящими от положения начального звена. В данном случае (долбежный станок) инерции зависит от угла поворота j начального звена.
В большинстве технических задач приведенный момент движущих сил и приведенный момент сил сопротивления задаются в виде графиков. В виде графика также задается и приведенный момент инерции. Поэтому решение уравнений движений механизма ведется графочисленными методами. При графочисленном решении уравнений движения удобно применить уравнение кинетической энергии. Для того использовать диаграмму  , устанавливающей связь между кинетической энергией Т и приведенным моментом инерции .
, устанавливающей связь между кинетической энергией Т и приведенным моментом инерции .
1.8. Определение приведенной силы сопротивления  приведенного момента сопротивления
приведенного момента сопротивления  .
.
Для определения приведенной силы используют рычаг Костера т.е. на повернутом плане скоростей параллельно самим себе переносим все силы, действующие на звенья механизма.
Приведенная сила – это сила, приложенная к кривошипу и ему перпендикулярна, причем работа приведенной силы, умноженная на ее элементарное перемещение равна сумме работ всех сил и пар сил, действующих на звенья.
Определение приведенной силы сопротивления  (пример для 5-го положения механизма).
(пример для 5-го положения механизма).
 (1.8.1)
(1.8.1)
где  - ускорение свободного падения.
- ускорение свободного падения.
откуда находим 

 (1.8.2.)
(1.8.2.)
где  - масштабный коэффициент механизма.
- масштабный коэффициент механизма.

Аналогично определяются и для 11 других положений механизма:
Таблица 1.8.1. приведенные силы сопротивления и приведенные моменты сопротивления .
| № положения | hg3' | hg3'' | Hg5 | hp | G3' | G3'' | G5 | Q | P приведенная | М приведенный |
| 0 | 0 | 0 | 0 | 212 | 77.1 | 242.9 | 240 | 3200 | 0 | 0,0 |
| 1 | 20 | 32 | 30,2 | 212 | 957,1642 | 245,8 | ||||
| 2 | 28 | 20 | 27,8 | 212 | 895,5245 | 230,0 | ||||
| 3 | 32 | 16 | 29,4 | 212 | 951,6755 | 244,4 | ||||
| 4 | 0 | 28 | 29 | 212 | 898,1189 | 230,6 | ||||
| 5 | 16 | 32 | 28,8 | 212 | 932,0075 | 239,3 | ||||
| 6 | 28 | 28 | 27,6 | 212 | 886,3509 | 227,6 | ||||
| 7 | 28 | 16 | 19,2 | 212 | 639,2585 | 164,2 | ||||
| 8 | 0 | 0 | 0 | 212 | 0 | 0,0 | ||||
| 9 | 60 | 44 | 49,06 | 212 | 2,796226 | 0,7 | ||||
| 10 | 0 | 100 | 86 | 212 | 133,7264 | 34,3 | ||||
| 11 | 60 | 44 | 52 | 212 | 6,124528 | 1,6 |
1.9. Определение приведенного момента инерции  .
.
Приведенным моментом инерции называется момент инерции вращающегося вместе со звеном тела, кинетическая энергия которого в каждом рассматриваемом положении механизма равна сумме кинетических энергий всех его звеньев и обозначается  .
.

где  - кинетическая энергия машинного агрегата.
- кинетическая энергия машинного агрегата.
 - угловая скорость кривошипа,
- угловая скорость кривошипа,
где Тдв – кинетическая энергия двигателя,
 -угловая скорость двигателя,
-угловая скорость двигателя,
где 

Tм-ма=Тдв+Ткр+Т3+Т4 с. 335 [1]
Где Ткр - кинетическая энергия кривошипа,
Т3 - кинетическая энергия 3-го звена,
Т4 - кинетическая энергия 4-го звена,
По условию задачи центр масс звена ВО2Д задан пересечении медиан, для удобства решения применим другой метод, который заключается в разбиении звена ВО2Д на два звена ВО2 и О2Д центра масс с массами  и
и  :
:






Tм-ма=Тдв+Ткр+Т3+Т5

Аналогично определяются приведенные моменты инерции в о остальных 11 положениях. Данные заносим в таблицу:
Таблица 18.1. Приведенные моменты инерции
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 112 | 125,4 | 123,3 | 125,0 | 124 | 124,1 | 122,1 | 117,5 | 112,1 | 147,5 | 150 | 151,9 |
Выбираем масштабный коэффициент 
Построение графиков
Строим график зависимости 
масштабный коэффициент 
Интегрируем график методом хорд, троим график работы сил сопротивления  и график работы движущих сил
и график работы движущих сил  . Для интегрирования графика
. Для интегрирования графика  методом хорд выбираем полюсное расстояние и масштабный коэффициент работы:
методом хорд выбираем полюсное расстояние и масштабный коэффициент работы:

График работы движущих сил сопротивления представляет собой прямую, перпендикулярную, соединяющую начало и конец графика .
Строим график 
Аналогично определяется  для 12 других положений механизмаТаблица
для 12 других положений механизмаТаблица
Затем строим график приведенных моментов сопротивления 
Масштабный коэффициент 
Из графиков  и
и  методом общей переменной строим график - кривая Виттенбауэра.
методом общей переменной строим график - кривая Виттенбауэра.








