 2020-01-15
2020-01-15 139
139
Уравнение механической характеристики двигателя постоянного тока независимого (параллельного) возбуждения имеет вид:
 ,
,
где UC – напряжение подводимое к якорной цепи двигателя:
UC=UH=220 В;
M – электромагнитный момент, развиваемый двигателем, Н·м;
RДВ – сопротивление цепи якоря:
 ;
;
kФН – конструктивный коэффициент двигателя;
ω0 – скорость идеального холостого хода:
 ,
,
Δω – перепад скорости.
Приведенное уравнение преобразуем в уравнение электромеханической (скоростной) характеристики:
 ,
,
где I – сила тока в нагрузке.
Обе характеристики представляют собой прямые линии. Поэтому их построение осуществляется по двум точкам в координатах (ω0, I=0, ωН, I=IH). Номинальная угловая скорость рассчитана в подразделе 1.3:  .
.
Статические характеристики привода при питании от сети приведены на рисунке 2.1.1.
Из графика определяем  ,
,  (при Ф=0,5Фн) и
(при Ф=0,5Фн) и  , следовательно,
, следовательно,
 .
.
Диапазон регулирования в первой зоне:
 .
.
Диапазон регулирования во второй зоне:
 .
.
Полный диапазон регулирования:
 .
.
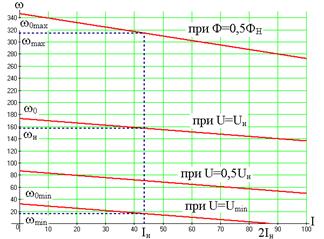
Рисунок 2.1.1 – Электромеханические характеристики двигателя при питании от сети
Жесткость механической характеристики:
 .
.
Статизм характеристики:
 .
.
Построение электромеханических характеристик двигателя при питании от преобразователя в разомкнутой системе и при допущениях непрерывности тока вплоть до I=0 можно осуществить по формуле
 .
.
Характеристики строим при углах управления  н (обеспечивает получение номинальной скорости
н (обеспечивает получение номинальной скорости  Н при номинальном токе нагрузки);
Н при номинальном токе нагрузки);  =1,5× н и = max (обеспечивает минимальную скорость при номинальной нагрузке).
=1,5× н и = max (обеспечивает минимальную скорость при номинальной нагрузке).
Значение н можно найти по формуле:
 ,
,
 .
.
Значение  найдем в точке (2Iн, w=0), тогда
найдем в точке (2Iн, w=0), тогда
 , т.е.
, т.е.
 .
.
Расчетные значения для построения характеристик приведены в таблице 2.1, характеристики – на рисунке 2.1.2.
Таблица 2.1 – Результаты расчета характеристик привода при питании от ТП

|
| 1,5 |
| ||||||
| I | 0 | IH | 2IH | 0 | IH | 2IH | 0 | IH | 2IH |

| 113,54 | 83,78 | 34,02 | 124,24 | 74,48 | 24,72 | 99,52 | 49,76 | 0 |
 Н = 18,88°
Н = 18,88° Н = 28,32°
Н = 28,32° max = 45,16°
max = 45,16°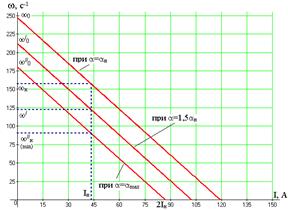
Рисунок 2.1.2 – Электромеханические характеристики двигателя при питании от тиристорного преобразователя в разомкнутой системе регулирования
Жесткость характеристик:
 .
.
Статизм характеристик:
 .
.
2.2 Составление расчетной функциональной схемы РЭП и определение входных параметров ( )
)
Расчетная функциональная схема РЭП показана на рисунке 2.2. На схеме приняты следующие обозначения: ЗС – задатчик скорости; ЗИ – задатчик интенсивности;  – напряжение задания;
– напряжение задания;  – напряжение управления во внешнем контуре, определяемое разностью между
– напряжение управления во внешнем контуре, определяемое разностью между  и сигналом обратной связи по скорости
и сигналом обратной связи по скорости  ; НЗ2 – нелинейное звено в регуляторе скорости – зона насыщения;
; НЗ2 – нелинейное звено в регуляторе скорости – зона насыщения;  – напряжение сравнения в зоне насыщения; РС – регулятор скорости;
– напряжение сравнения в зоне насыщения; РС – регулятор скорости;  – коэффициент усиления регулятора скорости;
– коэффициент усиления регулятора скорости;  – выходное напряжение регулятора скорости;
– выходное напряжение регулятора скорости;  – напряжение управления во внутреннем контуре, определяемое разностью между
– напряжение управления во внутреннем контуре, определяемое разностью между  и разностным значением сигнала обратной связи по току и опорным напряжением в НЗ1; РТ – регулятор тока;
и разностным значением сигнала обратной связи по току и опорным напряжением в НЗ1; РТ – регулятор тока;  – выходное напряжение регулятора тока; ТП – тиристорный преобразователь;
– выходное напряжение регулятора тока; ТП – тиристорный преобразователь;  – напряжение на выходе тиристорного преобразователя; Д1 – статорная часть электродвигателя;
– напряжение на выходе тиристорного преобразователя; Д1 – статорная часть электродвигателя;  – момент сопротивления;
– момент сопротивления;  – ток двигателя; Д2 – якорная часть двигателя; ДТ – датчик тока; НЗ1 – нелинейное звено в контуре тока – зона нечувствительности;
– ток двигателя; Д2 – якорная часть двигателя; ДТ – датчик тока; НЗ1 – нелинейное звено в контуре тока – зона нечувствительности;  – угловая скорость;
– угловая скорость;  – напряжение сравнения в контуре тока; ТГ – тахогенератор – реализует обратную связь по скорости;
– напряжение сравнения в контуре тока; ТГ – тахогенератор – реализует обратную связь по скорости;  – коэффициент передачи по скорости; ПУ – промежуточный усилитель в цепи обратной связи по скорости или делитель напряжения.
– коэффициент передачи по скорости; ПУ – промежуточный усилитель в цепи обратной связи по скорости или делитель напряжения.
В схеме используется отрицательная обратная связь по скорости и отрицательная обратная связь по току с отсечкой.
Цепь обратной связи по току выполнена зоной нечувствительности  , а входной каскад усилителя насыщается при
, а входной каскад усилителя насыщается при  .
.
Требуемый коэффициент усиления разомкнутой системы, необходимый по соображениям заданного статизма σЗ, определяется следующим образом:
 ,
,
где D – заданный коэффициент регулирования скорости,
 - заданный перепад скорости:
- заданный перепад скорости:
 ;
;
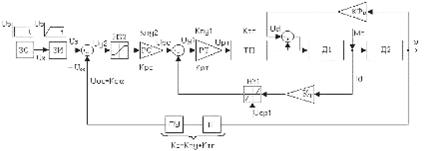
Рисунок 2.2 - Расчетная функциональная схема двухконтурной САУ РЭП
 - заданный относительный перепад двигателя при номинальной нагрузке,
- заданный относительный перепад двигателя при номинальной нагрузке,
 - перепад скорости в разомкнутой системе:
- перепад скорости в разомкнутой системе:
 ,
,
 - коэффициент передачи двигателя.
- коэффициент передачи двигателя.
Таким образом,
 .
.
Значения коэффициентов усиления по контурам управления определим из выражения:


Необходимый коэффициент обратной связи по скорости
 ,
,
 .
.
По полученному значению  выбираем тахогенератор с
выбираем тахогенератор с  :
:
 .
.
Выбираем тахогенератор типа ТГ-04 ( ).
).
Коэффициент согласующего промежуточного усилителя в цепи ОС:
 .
.








