 2020-01-15
2020-01-15 103
103
Проектируемый привод предназначен для реализации главного движения станка, следовательно, его основная задача – поддержание скорости соответственно заданной, то есть по своему функциональному назначению он относится к классу регулируемых электроприводов (РЭП), и основным регулируемым параметром для него является угловая скорость, а подчиненным – сила тока. Таким образом, основу структуры РЭП составят два контура управления:
- внутренний – контур тока (1К);
- внешний – контур скорости (2К).
Структурная схема РЭП представлена на рисунке 3.1.
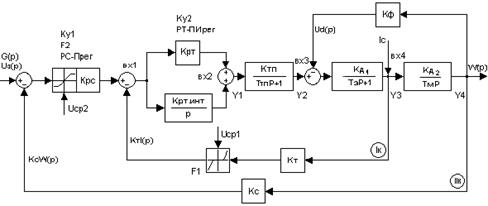
Рисунок 3.1 – Структурная схема САУ РЭП
Для определения параметров регуляторов тока и скорости воспользуемся методикой оптимизации по модульному оптимуму (настройка на технический оптимум) [4].
В качестве желаемых передаточных функций выбираем соответствующие апериодическому переходному процессу:
- для 1-го контура:
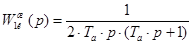 ;
;
- для 2-го контура:
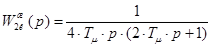 ,
,
где  .
.
Для определения передаточной функции регулятора тока запишем уравнение:
 ,
,
где  - искомая передаточная функция регулятора тока;
- искомая передаточная функция регулятора тока;
 - желаемая передаточная функция разомкнутого 1-го контура;
- желаемая передаточная функция разомкнутого 1-го контура;
 - передаточная функция, состоящая из реальных звеньев в разомкнутой системе;
- передаточная функция, состоящая из реальных звеньев в разомкнутой системе;
 - передаточная функция датчика тока.
- передаточная функция датчика тока.
Следовательно,
 ;
;
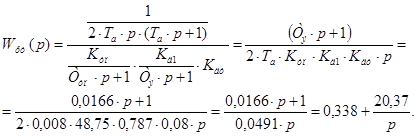
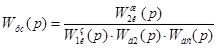
Получили передаточную функцию ПИ-регулятора тока. Аналогично производится синтез регулятора скорости:
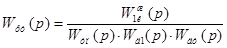
 ,
,
где  - искомая передаточная функция регулятора скорости;
- искомая передаточная функция регулятора скорости;
 - желаемая передаточная функция разомкнутого 2-го контура;
- желаемая передаточная функция разомкнутого 2-го контура;
 - передаточная функция, состоящая из реальных звеньев в разомкнутой системе;
- передаточная функция, состоящая из реальных звеньев в разомкнутой системе;
 - передаточная функция замкнутого внутреннего контура:
- передаточная функция замкнутого внутреннего контура:
 ;
;

 - передаточная функция датчика скорости.
- передаточная функция датчика скорости.
 ;
;
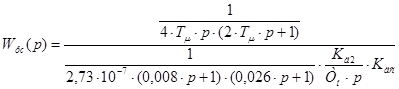 ;
;


Полученное значение коэффициента П-регулятора скорости очень мало, поэтому примем  .
.








