 2020-01-15
2020-01-15 261
261Манипулятор пневматический с ручным управлением.
Модель - 2/15.140005, заводской номер - № 316.
Изготовлен Электрогорским опытно – экспериментальным заводом и предназначен для механизации процессов погрузки – выгрузки заготовок и деталей на обрабатывающим оборудовании, а также при производстве сборочных, погрузочно – разгрузочных и транспортно – складских работ.
Таблица 2. Техническая характеристика.
| Тип манипулятора | стационарный | ||
| Грузоподъемность мах, кг | 100 | ||
| Усилия перемещения груза, Н | По вертикали | 40 | |
| По горизонтали | 40 | ||
| Давления воздуха, МПа | 0,4 – 0,63 | ||
| Габаритные размеры, мм | длина | 3000 | |
| ширина | 600 | ||
| высота | 4000 | ||
| Масса, кг | 550 | ||
| Зона обслуживания, мм | по высоте | 0 - 1800 | |
| по радиусу | 600 - 3000 | ||
| Поворот вокруг оси колонны, град | 360 | ||
| Скорость подъема и опускания груза, м/с | 0,5 | ||
Устройство манипулятора 2/15.140005:
На поворотной оси, расположенной в стойке 2, закреплена подвижная часть манипулятора, состоящая из двух жестко соединенных между собой щек 3 и многозвенного рычажно – стержневого механизма пантографа. Пантограф состоит из стрелы 11, тяги 12,звена 10, рукояти 13 и шарниров соединения пантографа. На рукояти 13 шарнирно закреплен кран управления 15(датчик веса), несущий узел крепления сменных грузозахватных органов 16.Щеки имеют горизонтальные и вертикальные пазы, в которых шарнирно закреплены, соответственно, тяга 12 и стрела 11. Оси этих шарниров представляют собой опорные, перемещающиеся вдоль пазов. Перемещение опорных роликов в горизонтальном направлении оператором за ручку 14. Перемещение опорных роликов в вертикальных пазах осуществляется приводом 4, шток которого шарнирно связан с роликами.
В стационарном исполнении манипулятор устанавливается на колоне 1.
Работа манипулятора:
Сжатый воздух из сети по трубопроводу подводится к крану управления(КУ). При нажатии рукоятки КУ вверх, открывается клапан. Воздух по трубопроводу из КУ поступает в верхнюю полость привода пневмогидробака ПГБ манипулятора, заполненную маслом. Вытесняемое масло приводит в движение поршень.
Подъем груза:
При нажатии рукоятки КУ вниз открывается клапан, через который воздух по трубопроводу выходит из верхней полости привода манипулятора в атмосферу. Масло из гидроцилиндра вытесняется в пневмогидробак.
Опускание груза:
В пневмосхеме установлен предохранительный клапан, ограничивающий мах давление в пневмосистеме, что необходимо для предотвращения перегрузок манипулятора. Клапан отрегулирован на давление, позволяющее поднимать груз весом 100 кг.
Техническое обслуживание.
Ежедневно перед началом работы на манипуляторе:
- убедитесь в отсутствии каких – либо повреждений или неисправностей манипулятора.
- обнаружив неисправность или повреждение, примите все меры к их устранению.
Таблица 3. Характерные неисправности и методы их устранения.
| Наименования неисправности | Вероятная причина | Метод устранения |
| Груз не фиксируется в поднятом положении а) шум выходящего воздуха в КУ | поднята траверса | Ослабить гайки и опустить траверсу до прекращения шума выходящего воздуха. |
| б) самопроизвольный подъем стрелы манипулятора | нарушение регулировки крана | Ослабить контр – гайки. Ослабляя пружины добиться фиксирования стрелы с грузом (без груза). |
3.3 Манипулятор HIAB 166E-4CLX:
Данная крано-манипуляторная установка с гидровлическим управлением. Количество гидровлических удлинителей четыре. Кинематическая версия стрелы «Е», т.е. первая и вторая стрела соединена траверсами, улучшающая грузоподъемность на максимальном вылете.
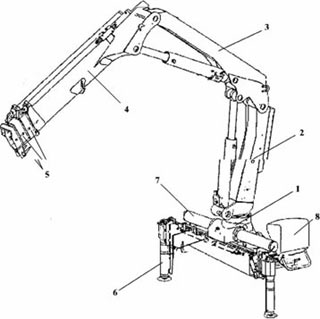
Рис.1.Схемаманипулятора HIAB 166E-4CLX.
1. Неповоротная платформа с опорно-поворотным устройством
2. Колонна
3.Первая стрела
4. Вторая стрела
5. Удлинители
6.Выносные опоры
7. Механизм поворота
8. Рычаги управления.
Техническая характеристика:
Грузовой момент,тм ……………………………………………….. 4,6
Максимальная грузоподъемность………………………….. 1820 кг - 2,7 м
Грузоподъемность на максимальном вылете……………… 640 кг - 7,2 м
Размах опор, тип управления………………………………..4,7 м (ручн.).
Неисправности HIAB 166E-4CLX
В процессе эксплуатации грузоподъемной техники, в т.ч. и кранов-манипуляторов, возникает необходимость в проведении ремонтных работ. Для данной техники наиболее характерно протекание масла из гидроцилиндров или клапанов, что снижает грузоподъемность крана из-за падения давления в гидросистеме, приводит к уменьшению количества масла в гидросистеме, а также к повреждению резинотехнических изделий шасси при попадании на них масла. Также не является исключением повреждение хромового покрытия гидроцилиндров выносных опор.
Проведение ремонтных работ начинается с технического обследования крана-манипулятора, в ходе которого оценивается работоспособность узлов и агрегатов и определяется соответствие параметров крана-манипулятора, заявленным в паспорте данным. После этого составляется протокол обследования с указанием результатов и рекомендаций по проведению ремонта, а также его стоимостью и стоимостью запасных частей. По окончании ремонта проводится текущее техническое обслуживание крана-манипулятора. По окончании ремонта проводится передача крана-манипулятора заказчику, включающая в себя контрольные испытания. Наиболее часто встречающаяся неисправность - чрезмерный износ уплотнительных элементов, что приводит к протеканию масла из гидроцилинра, либо перетеканию масла внутри гидроцилиндра из штоковой полости в поршневую, что приводит к невозможности проведения точных монтажных работ и затруднению других видов работ. В ряде случаев (в основном для старых кранов) разборка гидроцилиндра вызывает большие затруднения в связи с их конструктивной особенностью. На основании большого опыта работы с продукцией данной фирмы была сделана специальная установка, позволяющая значительно снизить трудозатраты на разборку/сборку гидроцилиндров, а в ряде случаев является единственным вариантом, позволяющим разобрать гидроцилиндр.
3.4. Манипулятор VPL 90-76:
Основным достоинством манипулятора VPL 90-76 это: больший вылет стрелы(7600 мм), большая грузоподъемность при сохранении конструктивной массы. Как и в предыдущих моделях в этой модели тип механизма поворота колонны двухреечный на подшипниках качения разнесенных по валу, что предотвращает перегрузки колонны, уменьшает коэффициент трения обеспечивая более равномерную и плавную работу манипулятора, а также способствует продлению срока службы. Теперь максимальный вылет грейфера ниже плоскости основания составляет-4950мм, что обеспечивает уверенную работу манипулятора при захвате далеко лежащего груза. Чтобы обеспечить более надежную подачу жидкости и уменьшить ее нагрев во время работы, был увеличен гидробак с 66л до 106л. Такое решение связано с тем, что на манипуляторе VPL-90-76 установлен более мощный распределитель и гидронасос. Гидробак также снабжен устройством для подогрева жидкости в зимней период, термометром, заливной горловиной с фильтром, а также сливным фильтром с указателем загрязненности.
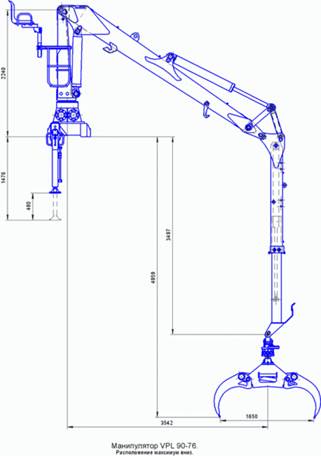
Рис. 2. Схема манипулятора VPL 90-76.
Техническая характеристика:
- Грузовой момент манипулятора, кНм, не менее………………………90
- Максимальный вылет грейфера от оси поворота колонны, мм……..7600
- Масса груза поднимаемая манипулятором на максимальном вылете
стрелы (без учета массы грейфера), кг, не более……………………..1207
- Максимальный вылет грейфера ниже плоскости основания, мм,
не менее………………………………………………………………… 4950
- Ход удлинителя, мм……………………………………………………1200
- Угол поворота манипулятора в горизонтальной плоскости, град,
не менее………………………………………………………………….408
- Масса конструктивная кг, не более…………………………………..2000
- Масса снаряженная, кг, не более…………………………………….2500
- Тип механизма поворота колонны – двухреечный на подшипниках качения (верхний подшипник - роликовый);
- Модуль зубчатого зацепления механизма поворота колонны ……..11
- Тип основавания – жесткое сварное;
- Рабочий орган:
– ротатор – GR 110-1;
– грейфер – VPL-X35;
- Гидронасос – 310.3.80.03;
- Гидрораспределитель – RM-316(Швеция);
- Основные несущие узлы гидроманипулятора VPL-90-76 выполнены из низколегированной стали повышенной прочности.
3.5. Манипулятор РМ-20.
Предназначен для захвата из пачки или с технологической поверхности, перемещения, поворота, укладывания листовых, в т.ч. длинномертных материалов, для работы с мешками, ящиками, коробками и др. грузами массой до 100 кг. Область применения манипулятора ограничивается целевым назначением, а также массо-габаритными параметрами обрабатываемых материалов, грузов и заготовок. и имеет следующие технические характеристики:
Таблица 4. Техническая характеристика.
| Привод | пневматический |
| Рабочее давление, бар, не более | 6 |
| Номинальный расход - Qn G1/4, Нл/мин, не более | 1000 |
| Электрооборудование, В | 24/220 |
| Монтажные позиции | на полу на стене на потолке |
| Количество степеней свободы | 4 |
| Масса, кг, не более | 250 |
3.6. Манипулятор HANDLING - Мод. 810H.
Манипулятор для загрузки и разгрузки заготовок или готовых деталей. Система пневматики гарантирует простоту эксплуатации и безопасность работы оператора.
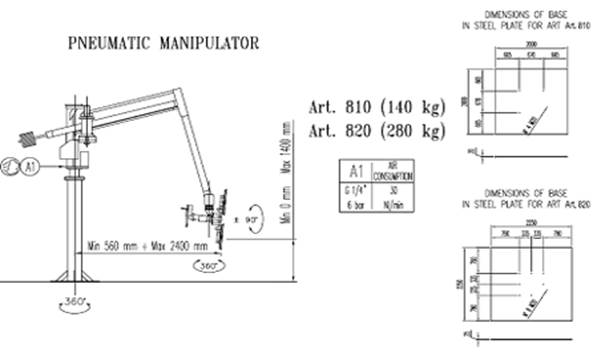
Рис.3. HANDLING - Мод. 810H.
3.7. Манипулятор- МАВ-15
Промышленный манипулятор – МАВ-15 предназначен для перемещения уравновешенных деталей. Захват расположен над центром тяжести детали. Органы управления манипулятором находятся в непосредственной близости от перемещаемого изделия, что позволяет позиционировать перемещаемую деталь с очень высокой точностью. Манипулятор комплектуется специализированным захватом с пневмоприводом, причём нормальное положение захвата - "закрыто". При необходимости разворота детали захват может быть оборудован приводным поворотным устройством. Разработан для помещений с ограниченной высотой потолков (высота колонны не более 3,0 м) и для увеличения высоты подъёма детали.

Рис. 4. Манипулятор- МАВ-15.
Технические характеристики:
Грузоподъёмность…………………………………………….до 100 кг
Высота подъёма……………………………………………………1,4 м
Рабочая зона………………………………….. сектор - 270°, радиус - до 3,0 м
Рабочий цикл……………………………………………………….15 с
Расход воздуха…………………………………………….. не более 36 л/цикл
Единый энергоноситель для привода подъёма и захвата
сжатый воздух …………………………………………………0,6 МПа.
Области применения:
Машиностроение - перемещение деталей и заготовок весом до 200 кг от подающего конвейера к обрабатывающему центру и обратно; перемещение деталей из транспортной тары к обрабатывающему центру и обратно; перемещение деталей при упаковке и маркировке. Автомобилестроение - перемещение узлов автомобиля при сборке (сборочный конвейер) - установка колёс, аккумуляторов, стекол, кресел, дверей, приборной панели, узлов двигателя и подвески. Химическая промышленность - перемещение изделий, тары с ЛВЖ или сыпучими материалами в пожароопасных и взрывоопасных зонах. Пищевая промышленность - перемещение исходного сырья и продукции (мешков, коробок, навесок, противней и т.п.). Производство строительных материалов - перемещение плитки, стекла, рулонов утеплителей, покрывных материалов и т.п. Деревообрабатывающая промышленность - перемещение листового материала (картона, фанеры, ДСП, ДВП, слоистых пластиков и т.п.) при изготовлении, разбраковке и упаковке.








