 2020-01-14
2020-01-14 1191
1191
При разработке и исследовании автоматической системы управления получают ее математическое описание – описание процессов, проистекающих в системе, на языке математики. Математическое описание может быть аналитическим (с помощью уравнений), графическим (с помощью графиков и структурных схем) и табличным (с помощью таблиц).
Для получения математического описания системы обычно составляют описание ее отдельных элементов. В частности, для получения уравнений системы составляют уравнения для каждого входящего в нее элемента. Совокупность всех уравнений элементов и дает уравнения системы.
Уравнения (а так же структурные схемы) автоматической системы управления называют ее математической моделью. Такое название обусловлено тем, что при математическом описании (составлении уравнений) физических процессов всегда делают какие-либо допущения и приближения. Сказанное обуславливается тем, что к математической модели предъявляются противоречивые требования: она должна, с одной стороны как можно полнее отражать свойства оригинала, а с другой стороны, быть по возможности простой, чтобы не усложнять исследование.
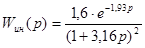
Аппроксимируем переходную характеристику объекта по регулирующему каналу. Исследуемый объект по каналу регулирования является объектом с самовыравниванием (рис.1.1). Объекты с самовыравниванием аппроксимируют дробно-рациональными передаточными функциями с введением звена запаздывания:
 , (2.1)
, (2.1)
где Коб – коэффициент передачи; t - время запаздывания; То – постоянная времени.
Первый метод определения передаточной функции:
Простейшим частным случаем оператора (2.1), имеющим в инженерной практике наибольшее применение, является передаточная функция вида:
 . (2.2)
. (2.2)
Определяя параметры передаточной функции, проводим касательную к кривой. Пересечение касательной с осью времени дает время запаздывания: tо = 2,85 с. Пересечение касательной с пределом установившегося значения дает: tо+То = 11,45 => То = 8,6 с. Установившееся значение есть коэффициент передачи: Коб = hуст = 1,6; следовательно, получаем передаточную функцию:
 (2.3)
(2.3)
График получившейся передаточной функции находится в Приложении 1.
Второй метод определения передаточной функции:
Параметры передаточной функции могут быть найдены следующим образом. Обозначив  , получим:
, получим:
 (2.4)
(2.4)
где hn и tn – координаты точки касания, соответственно по OX и OY.
Из (2.4) определяются параметры аппроксимирующей характеристики:
Тa = (1 - b)×То; (2.5)
 . (2.6)
. (2.6)
В нашем случае:  ; тогда:
; тогда:
Тa = (1 – 0,25)×8,6 = 6,45 с;  .
.
После подстановки параметров передаточная функция примет вид:
 ; (2.7)
; (2.7)
График получившейся передаточной функции находится в Приложении 1.
Третий метод определения передаточной функции:
Более точную аппроксимацию переходной функции ОУ даёт передаточная функция вида:
 . (2.8)
. (2.8)
Для определения параметров передаточной функции используем специальную номограмму. Так как значение параметра b выходит за пределы данной номограммы, то специально для третьей передаточной функции, воспользовавшись тем, что касательная к экспериментальной кривой проводится приблизительно, определим новые исходные параметры: 
По номограмме, исходя из нового значения  , находим, что
, находим, что  ;
;  тогда
тогда

 (2.9)
(2.9)
График получившейся передаточной функции находится в Приложении 1.
Четвертый метод определения передаточной функции:
Более точную аппроксимацию переходной функции объекта управления (ОУ) даёт передаточная функция вида:
 (2.10)
(2.10)
где 


 (2.11)
(2.11)
График получившейся передаточной функции находится в Приложении 1.
Вычислим погрешности аппроксимации всех функций. Погрешность аппроксимации может быть найдена по формуле:
 , (2.12)
, (2.12)
где SA,i – площадь, заключённая между экспериментальной и i-той кривой; Sисх – площадь под экспериментальной кривой.

Из расчётов видно, что наименьшую погрешность аппроксимации даёт функция Wоб,2(р). Следовательно, она наилучшим образом аппроксимирует экспериментальную характеристику.
Модель опережающей части объекта управления W  имеет вид:
имеет вид:
 (2.13)
(2.13)
Параметры этой передаточной функции находим по формулам:


После подстановки вычисленных значений в формулу (2.13), передаточная функция опережающей части объекта управления будет иметь вид:
3. Расчет параметров стабилизирующего регулятора частотным методом на ЭВМ.
Данный метод предполагает поиск оптимальных параметров алгоритма управления из условия минимума интегральной квадратичной ошибки регулирования при скачкообразном характере возмущений.
В основу метода положено представление о том, что минимуму интегрального квадратичного критерия при скачкообразном возмущении по управляющему каналу соответствуют оптимальные параметры ПИ-алгоритма  и
и  , отвечающие условиям
, отвечающие условиям
 при
при  ,
,
где  - модуль АФХ замкнутой системы, т.е. амплитудно-частотная характеристика замкнутой системы по задающему воздействию.
- модуль АФХ замкнутой системы, т.е. амплитудно-частотная характеристика замкнутой системы по задающему воздействию.
При расчете оптимальных и используются следующие соотношения:
где  - частота; A() – амплитудно-частотная характеристика (АЧХ) системы для данной частоты;
- частота; A() – амплитудно-частотная характеристика (АЧХ) системы для данной частоты;  - угол, заключенный между вектором АФХ объекта управления и отрицательной мнимой полуосью,
- угол, заключенный между вектором АФХ объекта управления и отрицательной мнимой полуосью,
 ;
;  - фазовая частотная характеристика (ФЧХ) для этой частоты; М – заданный показатель колебательности, на практике обычно принимают М=1,62.
- фазовая частотная характеристика (ФЧХ) для этой частоты; М – заданный показатель колебательности, на практике обычно принимают М=1,62.
По существу, вычисление требуемых значений  и сводится к поиску такого значения
и сводится к поиску такого значения  , при котором отношение принимает максимальное значение. Для расчета используется часть АФХ ОУ, заключенная в 3-м квадранте. Предельное значение
, при котором отношение принимает максимальное значение. Для расчета используется часть АФХ ОУ, заключенная в 3-м квадранте. Предельное значение  , ограничивающее диапазон частот для которого нужно проводить расчет, определяется из уравнения
, ограничивающее диапазон частот для которого нужно проводить расчет, определяется из уравнения  . Решая это уравнение, получаем:
. Решая это уравнение, получаем:
 . Для М = 1,62 угол = 52
. Для М = 1,62 угол = 52  . Из этого условия определяется диапазон частот, для которых должен быть проведен расчет. Для этого решают относительно уравнения:
. Из этого условия определяется диапазон частот, для которых должен быть проведен расчет. Для этого решают относительно уравнения:

Решение первого уравнения определяет  ,а второго -
,а второго -  .
.
Блок-схема алгоритма расчета представлена на рисунке (3.1).
Программа, вычисляющая оптимальные параметры ПИ-алгоритма, написана на языке Фортран.
Определяем A(), j(w) и  :
:


Для вычисления оптимальных параметров, на ЭВМ, необходимо определить значения частот при граничных значениях, т.е в той части АФХ, которая ограничена фазами 90° и 142°.
Для этого мы строим АФХ опережающего звена, из которой и определяем вышеупомянутые значения граничных фаз.
Из АФХ определяем: 

Оптимальные параметры мы будем рассчитывать в программе написанной на языке “Fortran”. Рисунок с результатами расчетов находится в Приложении 2
Получим: 



 |
Найдя оптимальные параметры, мы определяем передаточную функцию стабилизирующего регулятора:
|
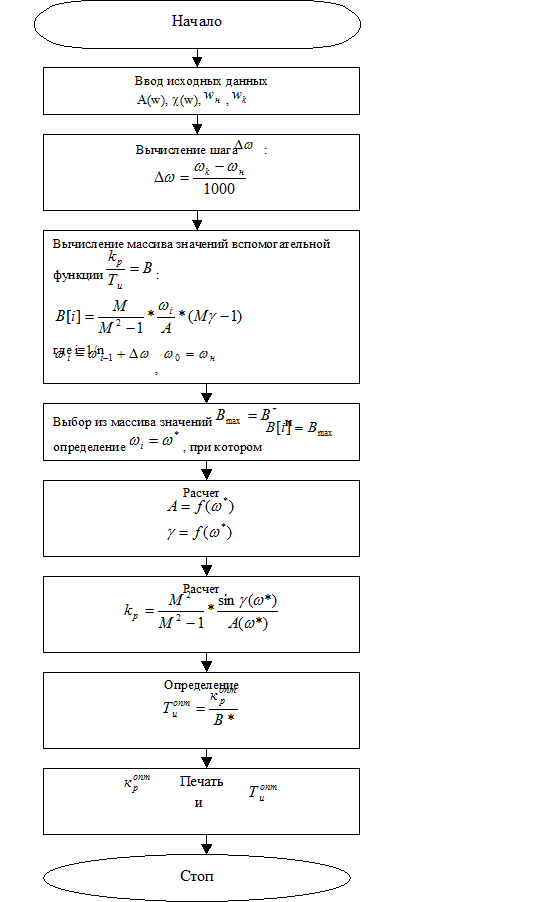
Рис 3.1. Алгоритм расчета оптимальных параметров ПИ-регулятора на ЭВМ.
4. Выбор ПИ-алгоритма управления и расчет параметров внешнего корректирующего регулятора Wр2(p) (графоаналитическим методом Ротача).
В качестве показателя оптимальности АСР принимается минимум интеграла от квадрата ошибки системы при действии на объект наиболее тяжелого ступенчатого возмущения по регулирующему каналу (интегральный квадратичный критерий) с учетом добавочного ограничения на запас устойчивости системы, т.е.
 . (4.1)
. (4.1)
Такой критерий допускает значительное перерегулирование  и увеличивает время регулирования, но он обеспечивает наименьшее динамическое отклонение регулируемой величины.
и увеличивает время регулирования, но он обеспечивает наименьшее динамическое отклонение регулируемой величины.
При практических расчетах запас устойчивости удобно характеризовать показателем колебательности системы М, значение которого в САУ, имеющих интеграл в алгоритме управления, совпадает с максимумом амплитудно-частотной характеристики системы:

где Wр. - резонансная частота, на которой Аз(w) имеет максимум.
Чтобы максимум не превышал некоторой заданной величены М, амплитудно-фазовая характеристика (АФХ) разомкнутой системы Wраз(jw) не должна заходить внутрь “запретной” области ограниченной окружностью, центр uo и радиус Ro которой определяется через М формулами:

Если Wраз(jw) касается указанной окружности, то это означает, что САУ находится на границе заданного запаса устойчивости.
На практике чаще всего принимают М = 1.62. При этом в САУ перерегулирование  степень затухания y=0,8-0,95.
степень затухания y=0,8-0,95.
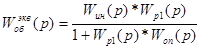 |
Определяем передаточную функцию эквивалентного объекта:
где  - модель опережающей части объекта управления,
- модель опережающей части объекта управления,

 - модель инерционной части ОУ,
- модель инерционной части ОУ,
- модель стабилизирующего регулятора
Рассчитываем параметры внешнего корректирующего регулятора графоаналитическим методом. Для чего строим АФХ модели эквивалентного объекта. Определив данные для построения, сведем их в таблицу 4.1. График АФХ находится в Приложении 3
Таблица 4.1
Данные для построения АФХ объекта.
| Частота | Фаза, ° | Амплитуда |
| 0 0 0,025 0,044 0,054 0,0721 0,0875 0,106 0,14 0,172 0,23 0,279 0,338 0,411 0,45 0,498 0,605 0,666 0,809 0,98 1,19 1,44 1,75 2,34 3,8 | 0 -6,19 -11,05 -19,67 -23,81 -31,63 -38,1 -45,8 -60 -71,25 -90,86 -105,6 -121,23 -137,59 -145,9 -154,36 -171,27 -179,75 -196,6 -213,5 -230,2 -246,7 -262,76 -284,9 313,48 | 1,25 1,247 1,242 1,22 1,21 1,19 1,16 1,13 1,048 0,97 0,83 0,72 0,6 0,49 0,43 0,38 0,3 0,26 0,19 0,15 0,11 0,08 0,06 0,03 0,01 |
В соответствии с принятым критерием расчет оптимальных параметров алгоритма управления будет проводиться в два этапа. На первом этапе в пространстве варьируемых параметров алгоритма управления определяется область, в которой замкнутая САУ будет обладать запасом устойчивости, характеризуемым величиной М, не ниже заданного. На втором этапе в найденной области отыскивается точка, соответствующая минимуму ошибки регулирования, т.е. заданному критерию качества (условие 4.1).
Рассмотрим ПИ-алгоритм управления, передаточная функция которого имеет вид:
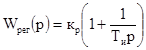 , (4.2)
, (4.2)
а параметрами, подлежащими определению, является коэффициент усиления кр и постоянная интегрирования Ти.
1). По АФХ объекта Wоб (jω) строим семейство характеристик разомкнутой системы Wраз(jω) для кр = 1 и нескольких фиксированных значений постоянной интегрирования Ти.
Для этого сначала строим несколько векторов характеристики объекта Wоб (jω), например, векторы  для частоты ω1,
для частоты ω1,  для ω2 и т.д. К их концам надо пристроить векторы
для ω2 и т.д. К их концам надо пристроить векторы  ,
,  ,…,
,…,  , повернутые по отношению к векторам ,
, повернутые по отношению к векторам ,  ,…,
,…,  на угол 90°. Длина векторов
на угол 90°. Длина векторов  ,
,  ,…,
,…,  выбирается из соотношения
выбирается из соотношения  (где в числителе
(где в числителе  - длина вектора АФХ объекта для определенного значения частоты wi, которую можно измерить непосредственно в миллиметрах; в знаменателе – произведение указанной частоты на фиксированное значение Ти). Через полученные точки С1, С2,…, Сn проводим плавную кривую, которая является характеристикой Wраз1(jω) для выбранного значения Ти.
- длина вектора АФХ объекта для определенного значения частоты wi, которую можно измерить непосредственно в миллиметрах; в знаменателе – произведение указанной частоты на фиксированное значение Ти). Через полученные точки С1, С2,…, Сn проводим плавную кривую, которая является характеристикой Wраз1(jω) для выбранного значения Ти.
Аналогичные построения проводим для других значений Ти. В итоге получаем семейство характеристик Wраз1(jω) для различных значений Ти.
2). Из начала координат проводим прямую ОЕ под углом b, характеризующим запас устойчивости по фазе и определяемым как
 , (4.3)
, (4.3)
3). С помощью циркуля вычерчиваем окружности с центром на отрицательной вещественной полуоси, каждая из которых касается одновременно как прямой ОЕ, так и одной из характеристик Wраз1(jω) (центр каждой окружности и ее радиус находим подбором).
4). Отношение требуемого радиуса R0
 ,
,
к полученному в каждом отдельном случае значению ri показывает, во сколько раз нужно изменить единичный коэффициент передачи регулятора (кр=1), чтобы каждая характеристика Wраз1(jω) касалась окружности с заданным М, т.е.
или  . (4.4)
. (4.4)
Для вычисления кр. пред используется формула:
 , (4.5)
, (4.5)
где r – радиус, определяемый путем подбора (Приложение 3), а m-масштаб построения (в нашем случае m=0,01).
Все результаты вычислений представлены в таблице 4.2
Таблица 4.2
| Ти | ri,мм | кi |
| 3 4 6 8 | 174 120 84 75 | 0,59 0,855 1,22 1,37 |
5). В результате в плоскости варьируемых параметров алгоритма кр и Ти строится граница области заданного запаса устойчивости, вид которой представлен в Приложении 4.
Максимум отношения кр/Ти, определяющее оптимальную настройку регулятора при низкочастотных возмущениях, соответствует точке пересечения касательной с границей заданного запаса устойчивости, проведенной через начало координат (точка А на рисунке в Приложении 4).
Передаточная функция регулятора, после определения координат точки А (кр.опт = 0,855 и Тр опт = 4 с), имеет вид:
Следует отметить, что найденные таким образом параметры являются оптимальными только при низкочастотном характере возмущений. По мере расширения полосы частот возмущений точка оптимума в плоскости параметров смещается вправо от точки А, при чем сначала это смещение идет вдоль границы заданного запаса устойчивости, а затем, при достаточно высокочастотных воздействиях, она вглубь области. Это означает, что с ростом частоты воздействий ПИ-алгоритм должен все более приближаться к П-алгоритму, кр которого также снижается. Это сопровождается ухудшением эффективности управления.

