 2020-01-14
2020-01-14 113
113Сегмент 1
 |
|
 |
|
|
|
 |
|
|
|
|
 |
|
 |
Сегмент 6

Сегмент 7
 |
|
 | |||
| |||
Сегмент 9
 |




|
|
|
|
|


|




|
|
|
 |
|
|
|
|
|
|
 |
Сегмент 12


Сегмент 13
 |
Сегмент 14

Сегмент 15

Сегмент 16

Сегмент 17

Сегмент 18

Сегмент 19

Сегмент 20

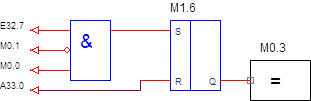
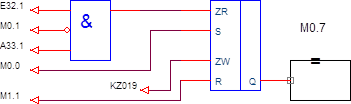
Представление программы управления роботом-манипулятором в виде функциональной схемы
Сегмент 1

Сегмент 2

Сегмент 3

Сегмент 4

Сегмент 5

Сегмент 6

Сегмент 7

Сегмент 8

Сегмент 9

Сегмент 10
Сегмент 11

Сегмент 12

Сегмент 13

Сегмент 14

Сегмент 15

Сегмент 16

Сегмент 17

Сегмент 18

Сегмент 19
Сегмент 20

Представление программы управления роботом-манипулятором в виде последовательности команд
Сегмент 1
:UN E33.4
:U (
:O E33.5
:O E33.2
:O E33.3
:)
:S M2.2
:O(
:O E33.4
:O(
:U E32.2
:U A33.2
:)
:O(
:U E32.2
:U A33.3
:)
:)
:R M2.2
:=M0.0
Сегмент 2
:U E33.0
:U E33.1
:S M2.3
:U E32.1
:U A33.1
:R M2.3
:=M0.1
Сегмент 3
:U M0.0
:U E32.2
:SI T1
:L KT 007.1
:O E32.7
:O(
:U M0.1
:U E32.1
:)
: R T1
:UT1
:=A33.0
Сегмент 4
:U A33.0
:U M0.0
:U E32.2
:S M1.0
:U E32.3
:R M1.0
:=A32.2
Сегмент 5
:U E32.7
:U E32.0
:U A33.0
:U M0.0
:S M1.2
:U E32.1
:R M1.2
:=A32.0
Сегмент 6
:U E32.5
:U E32.2
:U A33.0
:U M0.0
:S M1.3
:U E32.4
:R M1.3
:=A32.4
Сегмент 7
:U E32.1
:U M0.1
:U M0.0
:S M1.4
:U A33.0
:R M1.4
:=M0.5
Сегмент 8
:U A33.1
:U M0.1
:U M0.0
:SI T2
:L KT 007.1
:U E32.6
: R T2
:UT2
:=M0.2
Сегмент 9
:U E32.3
:UN M0.1
:U A33.0
:U M0.0
:U E32.6
:S M1.5
:U E32.7
:R M1.5
:=A32.6
Сегмент 10
:U E32.7
:UN M0.1
:U M0.0
:S M1.6
:U A33.0
:R M1.6
:=M0.3
Сегмент 11
:U A33.1
:U M0.1
:U M0.0
:SI T3
:L KT 007.0
:U E32.6
:R T3
:UT3
:=A32.7
Сегмент 12
:U E32.2
:UN M0.1
:U A33.1
:U M0.0
:U E32.7
:S M1.7
:U E32.6
:R M1.7
:=M0.4
Сегмент 13
:O M0.5
:O M0.3
:=A33.1
Сегмент 14
:O M0.4
:O M0.2
:=A32.5
Сегмент 15
:U E32.1
:U A33.1
:U M0.0
:U E32.7
:S M2.0
:U E32.0
:R M2.0
:=A32.1
Сегмент 16
:U E32.6
:U A33.1
:U M0.0
:U E32.3
:S M2.1
:U E32.2
:R M2.1
:=A32.3
Сегмент 17
:U E32.0
:UN A33.1
:U E32.7
:ZR Z1
:NOP 0
:U M0.0
:L KZ 011
:S Z1
:U M1.1
:R Z1
:UZ
:=M0.6
Сегмент 18
:U M0.0
:UN M0.6
:S M2.5
:U E33.3
:R M2.5
:=A33.3
Сегмент 19
:U E32.1
:UN M0.1
:U A33.1
:ZR Z1
:NOP 0
:U M0.0
:L KZ 019
:S Z1
:U M1.1
:R Z1
:UZ
:=M0.7
Сегмент 20
:U M0.0
:U N M0.7
:S M2.4
:U E33.2
:R M2.4
:=A33.2
Список литературы
1. Денисенко Т.А, Михайлов Е.П и др. "Методические указания к выполнению курсового проекта по курсу "Локальные системы автоматики", ОГПУ, 1997
2. Денисенко Т.А, Тихончук С.Т "Методические указания по применению контроллеров семейства SIMATIC S5", ОГПУ, 1998








