 2020-01-14
2020-01-14 256
256Кинематическая схема рычажного механизма показана на рис. 2.1.
Механизм плоский рычажный.
Для этого механизма: n = 5; p 5 = 7; p 4 = 0.
Степень подвижности плоского механизма определяется по формуле
П. Л. Чебышева:
W = 3 n – 2 p 5 ─ p 4= 3∙5 ─ 2∙7 – 0 = 1,
где n ─ число подвижных звеньев;
p 5 ─ число пар пятого класса;
p 4 ─ число пар четвёртого класса.
Согласно полученному результату для определенности движения всех звеньев механизма необходимо иметь одно входное звено.
Разложение механизма на группы Ассура показано на рис. 2.2
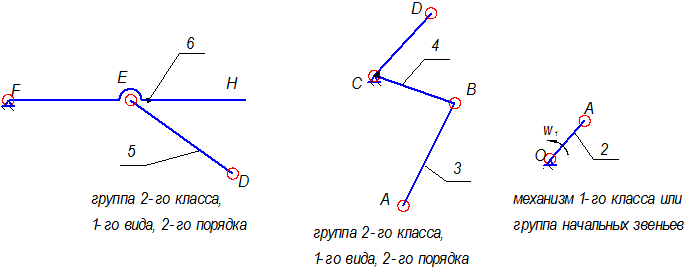
Рис.2.2. Строение механизма
Определим степень подвижности каждой группы в отдельности:
а) группа Ассура 2-го класса, 2-го вида:
W = 3 n – 2 p5 – p4 = 3∙2 – 2∙3 – 0 = 0,
б) группа Ассура 2-го класса, 1-го вида:
W = 3 n – 2 p5 – p4 = 3∙2 – 2∙3 – 0 = 0,
в) механизм 1-го класса:
W = 3∙ n – 2∙ p5 – p4 = 3∙1 – 2∙1 – 0 = 1.
Вывод: рассматриваемый механизм является механизмом 2-го класса.
Кинематический анализ рычажного механизма
Целью кинематического анализа является установление положений звеньев механизма, определение скоростей и ускорений его звеньев.
Построение положений звеньев
Задача о положениях звеньев решается на первом листе проекта графически путем построения кинематической схемы механизма в двенадцати положениях механизма. На плане механизма отобразим входное звено ОА отрезком длиной 15мм.
Масштабный коэффициент планов механизма
 .
.








