 2020-01-14
2020-01-14 172
172Сообщение типа 16 является специальным сообщением в коде ASCII, которое может индицироваться на принтере или ЭЛТ. Каждое сообщение типа 16 может иметь длину до 90 символов. Для согласованности с другими сообщениями, младшие значащие биты передаются первыми, что означает, что “переворот данных”, также применяется в этом сообщении. 8-битовый код ASCII используется, но следует принимать во внимание, что младший значащий бит, как правило, будет всегда равняться нулю вследствие того, что не существует стандарта на обозначение других символов, отличных от 7-битовых символов ASCII. Если, например, для специальных целей коммерческие операции или агентства выбирают для использования графические символы IBM, они могут быть переданы с использованием сообщение типа 16. Заполняющие биты в таком сообщении представляются нулями во избежание случайной ошибочной интерпретации чередующихся 1 и 0, которые служат заполнителями в других сообщениях.
Рисунок 2.6 показывает слово в том виде, как оно выглядит в сообщении типа 16.
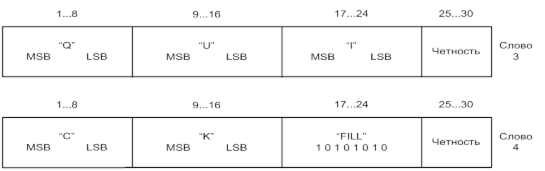
Рисунок 2.6 - Сообщение типа 16. ASCII (“QUICK”)
Погрешности местоопределения и их анализ
Составляющие ошибок
Точностные характеристики СРНС определяются уровнем погрешностей, сопутствующих навигационным определениям (погрешности определения псевдодальности ― ПД) и геометрическому расположению используемому для оценки место ИСЗ и АП.
Погрешность измерения ПД складывается из погрешностей следующих составляющих:
- эфемеридная информация;
- частотно-временная синхронизация;
- шумы приемника;
- внешние помехи;
- тропосферные задержки;
- ионосферные задержки;
- наличие переотраженных сигналов (многолучевость).
При статистической независимости этих погрешностей, что практически всегда имеет место, дисперсия погрешности оценки ПД равна сумме дисперсий перечисленных составляющих. Величины составляющих могут существенно различаться и имеют различные временные интервалы изменчивости. Последнее приводит к различному проявлению их на этапе последовательного многократного измерения ПД и места в сеансе местоопределения. По различным оценкам уровень погрешности (СКО) определения псевдодальностей по легко обнаруживаемому коду (C/A) находится в пределах 6,2–6,6 м и 7,7–9,6 м соответственно для околозенитных и пригоризонтных ИСЗ.
Измеренное значение ПД пересчитывается к измеренной дальности, которой соответствует поверхность положения. Пересечение трех поверхностей положения определяет местоположение АП.
Среднеквадратическая погрешность определения поверхности положения связана с погрешностью измеренного навигационного параметра σ i соотношением:


где ― коэффициент ошибки (погрешности).
Для дальномерного измерителя к = 1.
Среднеквадратическая погрешность определения места по минимально необходимому числу измерений с некоррелированными погрешностями рассчитывается по формуле:
 ,
,
где  ;
;  , ― среднеквадратические погрешности определения поверхностей положения;
, ― среднеквадратические погрешности определения поверхностей положения;  ― угол пересечения 1 и 2 поверхностей положения в месте расположения источника излучения;
― угол пересечения 1 и 2 поверхностей положения в месте расположения источника излучения;  ― среднеквадратическая погрешность определения линии пересечения 1 и 2 поверхностей положения;
― среднеквадратическая погрешность определения линии пересечения 1 и 2 поверхностей положения;  ― угол пересечения третьей поверхности положения с линией пересечения первых двух.
― угол пересечения третьей поверхности положения с линией пересечения первых двух.
Приведенные выражения показывают, что связь между погрешностью измерения псевдодальности и погрешностью места осуществляется посредством некоторого коэффициента (коэффициентов), зависящих только от взаимного расположения АП и ИСЗ, точнее, от углов пересечения поверхностей положения. Рассмотрим геометрический фактор, называемый в иностранной литературе ― коэффициент ухудшения точности (GDOP ― Geometric Diluction of Precision). Введено несколько видов коэффициентов: PDOP(пространственный, трехмерный), HDOP(горизонтальный, двумерный), VDOP(по высоте). Аналогичные понятия введены для погрешностей определения скорости и времени.
Недостаточный GDOP (большое значение) соответствует случаю, когда множества используемых спутников отличаются по положению на небесной сфере незначительно или напротив расположение элементов созвездия, обеспечивающее повышенную точность местоопределения достаточному GDOP. (см. рис. 4.10).


Рис. 4.10. Расположение ИСЗ, обеспечивающее низкую (слева большой GDOP:5−10) и высокую (справа GDOP <4) точность
Существует несколько видов погрешностей (ошибок), вызываемых различными причинами. Условно их разделяют на шумовые ошибки, ошибки смещения и случайные грубые ошибки. Качественное проявление видов ошибок представлено на рис. 4.12.

Шумовой разброс. Систематическое Грубая ошибка.
 – заданные координаты;
– заданные координаты;
 – измеренные координаты.
– измеренные координаты.
Рис. 4.11. Проявление шумовой ошибки, ошибки смещения и грубой ошибки
Шумовые ошибки обусловлены шумами приемника (примерно 1 м) и комбинациями кодовых сигналов дальности (примерно 1 м).
Источники ошибок смещения (систематической ошибки) следующие: ошибки спутниковых часов, неисправленные сегментом управления (могут приводить к ошибкам порядка одного метра); ошибки эфемероидных данных (до 1 м); тропосферные задержки (до 1 м); не моделируемые ионосферные задержки (до 10 м; используемая модель учета ионосферной задержки может устранить только приблизительно половину из возможных 70 нс задержки; остающиеся же 10 м являются следствием неопределенности этой модели); влияние отраженных радиосигналов (до 0,5 м) от близко расположенных поверхностей, которые интерферируют с сигналом, следующим по прямому направлению от спутника.
Грубые ошибки могут приводить к ошибкам в сотни километров и более. Причины их следующие. Ошибки сегмента управления из-за компьютерной или человеческой ошибки могут вызывать ошибки от одного метра до сотен километров. Ошибки пользователя, включая неправильный ввод геодезических данных, могут вызывать ошибки от 1 до сотен метров. Ошибки приемника из-за программного обеспечения или отказов аппаратных средств могут вызывать ошибки любого размера.
В целом шумовая и систематические ошибки смещения, объединяясь, приводят к типичным ошибкам расстояния около пятнадцати метров для каждого из спутников, используемых при определении координат.
При эксплуатации системы NAVSTAR предусмотрено намеренное снижение точности (SА) временным дрейфом дальномерных кодов, изменяющимся с течением времени для того, чтобы ограничить точность для всех пользователей, кроме американской армии и нескольких правительственных агентств. Потенциальная точность С/А -кода (30 м) таким образом уменьшалась до 100 м (два среднеквадратичных отклонения). SA в каждом спутниковом сигнале различна, поэтому ошибка, возникающая в результате навигационного решения – функция SA каждого ИСЗ, используемого в решении задачи навигации. Так как SA имеет период в несколько часов, то определение положения, или индивидуальные псевдодиапазоны SА не могут быть устранены путем усреднения за более короткий период. В настоящее время намеренное снижение точности отключено.
C учетом всех составляющих погрешностей, на одночастотном оборудовании с использованием C/A кода гарантировано получается объявленная точность по координатам (широта, долгота) для системы GPS равную ~100 метров (максимальная ошибка).








