2020-01-14
2020-01-14 178
178Регулирование электрического режима дуговых печей и соответствующая техника достигли высокого уровня развития. В существенно меньшей степени осуществлена автоматизация теплового и технологического режимов плавки. Поэтому выберем в качестве САР систему регулирования давления газов в рабочем пространстве печи, адавление газов – в качестве регулирующего параметра.
Регулирование давления в нашей схеме осуществляется за счёт выдвижения – задвижения шибера, установленного на газоотсосе, как было описано выше.
Давление газов в печи с течением процесса постоянно увеличивается. Максимально допустимое значение – примерно около 500 – 600Па. Может наступить такой момент, когда давление будет настолько высоким, что может привести к нарушению хода технологического процесса или разрыву печи. Поэтому его (давление) можно отнести к основным параметрам печи, подлежащим автоматическому контролю и регулированию, и данная система автоматического регулирования заслуживает внимания наравне с системой автоматического регулирования параметров электрического режима.
Расчёт автоматических систем регулирования основывается на статических и динамических характеристиках объекта управления. Эти характеристики находятся по справочным таблицам или определяются экспериментально.
Статической характеристикой ОУ (объект управления) называется зависимость регулируемой (управляемой) – выходной величины объекта управления от входной величины y в установившемся состоянии. Входной величиной являетсяположение регулирующего органа (регулирующий орган включён в объект) или величина, характеризующая нагрузку ОУ, то есть расход энергии, топлива, воды, пара (регулирующий орган не включён в ОУ).
Многие металлургические ОУ, являясь по существу объектами с распределёнными параметрами, могут при определённых условиях быть представлены в виде ОУ с сосредоточенными параметрами. Временными динамическими характеристиками таких ОУ называют изменение выходной величины во времени при некоторых типовых изменениях входной величины ОУ. В качестве типовых входных воздействий рассматривают ступенчатую и импульсную функцию. Для металлургических ОУ наиболее распространённой и легко получаемой динамической характеристикой можно считать кривую разгона, т.е. изменение во времени выходной величины x(t) после ступенчатого изменения входной величины на ∆y.
Входной величиной в нашей САР давления газов является положение регулирующего шибера, % хода ИМ (исполнительного механизма). Выходной величиной является величина давления.
Из справочников динамических характеристик похожих ОУ (мартеновская печь, методическая печь, доменное производство) за неимением возможности проведения опытов на самом ОУ (на заводе ПФ ТОО “Кастинг” данный параметр – давление – вообще не измеряется ) строим кривую разгона – динамическую характеристику дуговой сталеплавильной печи (изменение величины давления во времени в зависимости от изменения положения шибера).
Положение шибера (входная величина) изменяется скачкообразно (ступенчато) (рисунок 5):
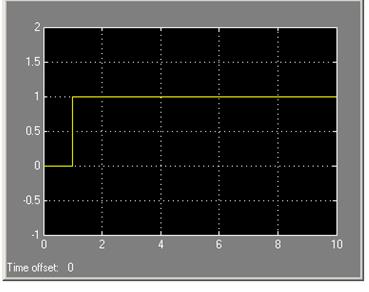
Рисунок 5 - Ступенчатое изменение входной величины.
В результате давление в печи (выходная величина) отвечает на изменение положения шибера следующим образом (рисунок 6):
|


Рисунок 6 - Кривая разгона объекта управления.
 Если шибер закрывается, то давление в рабочем пространстве печи начинает стремительно расти, и в определённый момент времени (≈7 – 8с) оно достигнет максимального значения (50Па). При этом необходимо будет вновь открыть шибер, чтобы разрядить печную атмосферу и понизить давление в печи.
Если шибер закрывается, то давление в рабочем пространстве печи начинает стремительно расти, и в определённый момент времени (≈7 – 8с) оно достигнет максимального значения (50Па). При этом необходимо будет вновь открыть шибер, чтобы разрядить печную атмосферу и понизить давление в печи.
По приведённой кривой разгона можно сделать вывод, что рассматриваемый нами объект управления является объектом с самовыравниванием, так как описывается апериодическим (инерционным) звеном первого порядка, и статическим объектом.
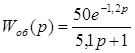
Объекты управления могут быть одноемкостными и многоемкостными. Одноемкостные объекты описываются одним типовым звеном, многоемкостные — несколькими типовыми звеньями, включенными по последовательной, параллельной или смешанной схеме. В нашем случае объект многоемкостной, так как описывается двумя типовыми звеньями (апериодиодическое звено и звено транспортного запаздывания), а именно
 , (4)
, (4)
для простейшего статического объекта с запаздыванием, где  – постоянная времени объекта,
– постоянная времени объекта,  – время запаздывания.
– время запаздывания.
Передаточная функция апериодического (инерционного) звена первого порядка
 (5)
(5)
Передаточная функция звена транспортного запаздывания
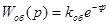 (6)
(6)
По кривой разгона определяем следующие параметры, характеризующие динамические свойства объекта:
1) запаздывание – если в точке максимальной скорости изменения выходной величины провести касательную к кривой разгона и продолжить её до пересечения с линией начального установившегося значения выходной величины, то отрезок времени от момента внесения возмущения до точки пересечения касательной с осью абссцис определит общее запаздывание объекта управления τ.
2) постоянная времени – отрезок времени от момента пересечения касательной с линией начального установившегося значения до момента её пересечения с линией нового установившегося значения называется постоянной времени объекта Т.
3) коэффициент передачи – для статического объекта представляет собой изменение выходной величины объекта при переходе из начального в новое установившееся состояние, отнесённое к единичному возмущению на входе
 (7)
(7)
Строим касательную к кривой разгона (рисунок 6), и определяем по графику основные параметры, описывающие динамические свойства объекта, на основе выше изложенного
 ;
;  ;
;  (8)
(8)
Следовательно, передаточная функция объекта управления имеет вид
|