 2020-01-14
2020-01-14 407
407
Узловыми и задаваемыми точками многозвенного шарнирного механизма являются, согласно исходным данным, точки: A, B, C, D, M, K. Закон движения, скорость и ускорение точки B определен ранее:
 (1.16)
(1.16)
Для остальных точек законы движения запишем в векторной форме:
Точка А 
Точка C 
Точка M 
Точка D 
Тоска К 
или в проекциях на оси декартовой системы координат
Точка А 
Точка C 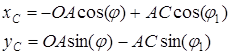
Точка M  (1.17)
(1.17)
Точка D 
Точка К 
Дифференцированием по времени (1.17) определяем проекции скоростей точек механизма на декартовые оси координат, а также модули и направления векторов скоростей точек.
Точка А 
Точка В 
Точка С  (1.18)
(1.18)
Точка M 
Точка К 
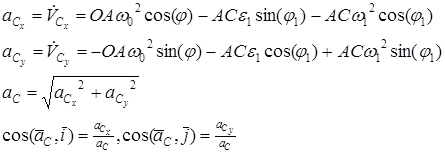
Дифференцируя по времени проекции скоростей точек (1.18) определяем ускорения точек механизма:
Точка А

Точка C
Точка M
 (1.18)
(1.18)
Точка D


Точка К

Соотношения (1.6)-(1.19) представляют математическую модель кинематического поведения механизма, которая позволяет определить законы движения всех звеньев механизма, координаты узловых точек, а также скорости и ускорения звеньев и узловых точек.








