 2020-04-20
2020-04-20 502
502
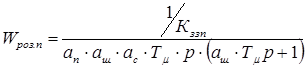
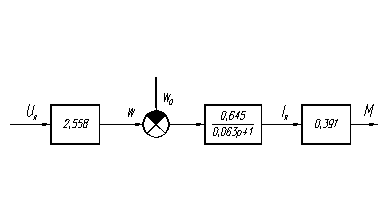
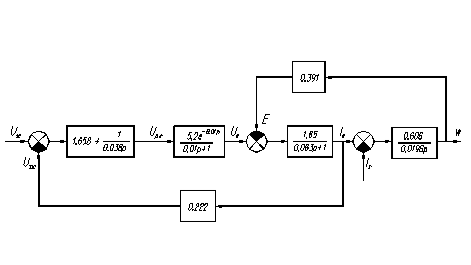
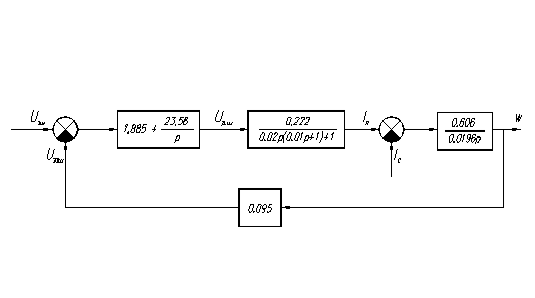
В якості об’єкта регулювання положення приймається двократно інтегруюча система регулювання швидкості в системі керований перетворювач – двигун. Необхідно доповнити її інтегруванням швидкості для одержання переміщення і ввести зворотній зв¢язок за положенням. Утворюється трьох контурна система регулювання положення. Передавальна функція об’єкта регулювання положення має вигляд:


Необхідна передавальна функція розімкнутого контуру регулювання положення визначається за формулою:
Де: ап – коефіцієнт швидкодії контуру, який приймається рівним 4.
Кззп – коефіцієнт підсилення каналу зворотного зв¢язку за положенням.
 м/рад.
м/рад.
Де іп – передавальне число між виконуючим механізмом і двигуном на
робочій подачі.
 .
.
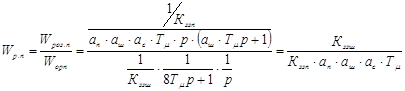
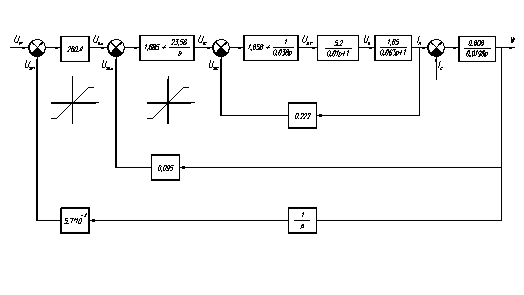
Ми бачимо, що для досягнення бажаної передавальної функції контуру положення необхідно знехтувати доданками 
 у виразі для передавальної функції об'єкта регулювання положенням. Тоді ми отримаємо П-регулятор положення такого вигляду:
у виразі для передавальної функції об'єкта регулювання положенням. Тоді ми отримаємо П-регулятор положення такого вигляду:

Розрахуємо параметри регулятора положення. Для цього задамо необхідні опори. Значення опору Rзп повинно бути не менше 10-15 кОм. Усі інші опори розраховані нижче:
Rзп = 20 кОм
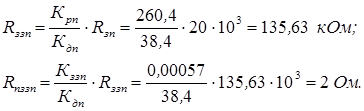
Де Кдп – коефіцієнт передачі датчика положення. (Див. вище розділ 3.1.)
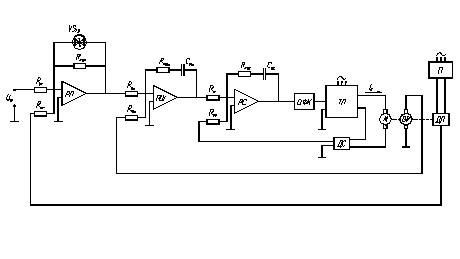
Напругу пробою стабілітронів, увімкнених у зворотні зв'язки регуляторів для обмеження вихідної напруги, приймаємо рівним максимальній вхідній напрузі приведених в схемах підсилювачів постійного струму, тобто Ucт= 10 В.
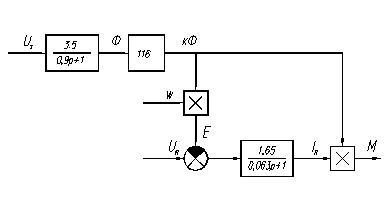
Структурна схема контуру регулювання положення знаходиться в додатках.
Висновки
Таким чином при розрахунку електропривода верстата з ЧПК необхідно виходити із основних вимог проектування електроприводів подачі верстатів, які перераховані у першому розділі.
Застосована методика проектування трьохконтурної системи з підпорядкованим керуванням координат станка є
· точною, завдяки ПІ-регулятору струму, налагодженому на технічний оптимум (похибка не перевищує 8%);
· швидкодіючою, завдяки ПІ-регулятору швидкості, нала-годженому на симетричний оптимум (швидкодія контуру аш=8);
· високопозиційною, завдяки П-регулятору положення (коефіцієнт передачі Кззп = 0,00057 м/рад.)
При цьому досягнуті найкращі показники керування: забезпечений діапазон регулювання швидкості обертання двигуна, лінійність статичної характеристики електропривода, стійкість системи автоматичного керування.
Виконання вказаних розрахунків грунтується на використанні нормативної технічної документації, початкових, довідникових, нормативних, літературних та інших даних, результати яких відображені у курсовій роботі.
Література
1. Методичні вказівки до виконання курсового проекту з дисципліни “Електропривод і автоматизація промислових роботів і маніпуляторів” для студентів спеціальності 7.092203 “Електропривод та автоматизація промислових установок”/ Шульга О. В. – ПДТУ, 1996 р. – 28 с.
2. Гусев И.Г. Устройства числового программного управления: Учебное пособие для энергетических ВУЗов, – М.: Высшая школа, 1986 г.
3. Ильин О.П. Системы программного управления производственными установками и робототехническими комплексами: Учебное пособие для ВУЗов, – М.: Высшая школа, 1988 г.
Додатки
| Форм. |
| Позначення | Найменування | Кільк. | Прим. | ||||||||||||||
|
|
| Відомість курсового проекту |
| ||||||||||||||||
| А4 |
| ЕАРМ 502.001.000 ТЗ | Технічне завдання | 1 |
| ||||||||||||||
| А4 |
| ЕАРМ 502.001.000 ПЗ | Пояснювальна записка | 23 |
| ||||||||||||||
| А4 |
| ЕАРМ 502.001.001 Е1 | Схема структурна ДПС | 1 |
| ||||||||||||||
| А4 |
| ЕАРМ 502.001.002 Е1 | Схема структурна ДПС з постійним | 1 |
| ||||||||||||||
|
|
| магнітним потоком |
| ||||||||||||||||
| А4 |
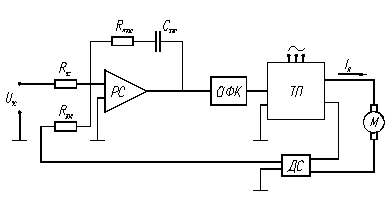
| ЕАРМ 502.001.003 Е2 | Схема функціональна контуру | 1 |
| ||||||||||||||
|
|
| регулювання струму |
| ||||||||||||||||
| А4 |
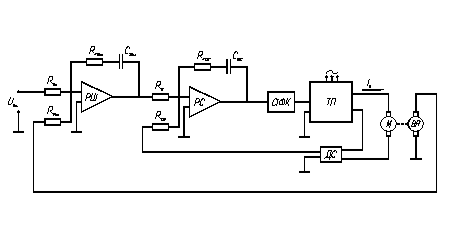
| ЕАРМ 502.001.004 Е2 | Схема функціональна контуру | 1 |
| ||||||||||||||
|
|
| регулювання швидкості |
| ||||||||||||||||
| А4 |
| ЕАРМ 502.001.005 Е2 | Схема функціональна контуру | 1 |
| ||||||||||||||
|
|
| регулювання положення |
| ||||||||||||||||
| А4 |
| ЕАРМ 502.001.006 Е1 | Схема структурна контуру | 1 |
| ||||||||||||||
|
|
| регулювання струму в системі ТП-Д |
| ||||||||||||||||
| А4 |
| ЕАРМ 502.001.007 Е1 | Схема структурна контуру | 1 |
| ||||||||||||||
|
|
| регулювання швидкості |
| ||||||||||||||||
| А4 |
| ЕАРМ 502.001.008 Е1 | Схема структурна контуру | 1 |
| ||||||||||||||
|
|
| регулювання положення |
| ||||||||||||||||
| Зм | Лист | № докум. | Підпис | Дата |
| ||||||||||||||
| Виконав | Відомість курсового проекту | Літ. | Лист | Листів | |||||||||||||||
| Перевір |
|
| н |
| 1 | 1 | |||||||||||||
| Н.контр |
|
| |||||||||||||||||
| Затв. | |||||||||||||||||||
| Форм | Позначення | Найменування | Кільк | Прим. | |||||||||||||||
|
| М | ПБВ 100-М | 1 | 0,75 кВт | |||||||||||||||
|
| ТП | ТП ТС 1,0 | 1 | 1,0 кВт | |||||||||||||||
| СІФК | ТСА 160А | 1 | 160 А | ||||||||||||||||
|
| ДС | ДХГ-2 | 1 | кт = 3,5 | |||||||||||||||
|
| BR | ТД-101 | 1 | ктг = 0,021 | |||||||||||||||
|
| ДП | ВТ-5 | 1 | кт = 0,96 | |||||||||||||||
|
| РС | К153УД5А | 1 | Umax = 20 B | |||||||||||||||
|
| РШ | К153УД5А | 1 | Umax = 20 B | |||||||||||||||
|
| РП | К140УД8 | 1 | Umax = 20 B | |||||||||||||||
|
| Rзс | МЛТ-50 | 1 | 4,7 кОм | |||||||||||||||
|
| Rззс | МЛТ-100 | 1 | 73 кОм | |||||||||||||||
|
| Rпззс | МЛТ-50 | 1 | 7,8 кОм | |||||||||||||||
|
| Rзш | МЛТ-50 | 1 | 10 кОм | |||||||||||||||
|
| Rззш | МЛТ-5 | 1 | 2,2 кОм | |||||||||||||||
|
| Rпззш | МЛТ-50 | 1 | 6 кОм | |||||||||||||||
|
| Rзп | МЛТ-50 | 1 | 20 кОм | |||||||||||||||
|
| Rззп | МЛТ-200 | 1 | 136 кОм | |||||||||||||||
|
| Rпззп | МЛТ-5 | 1 | 2 Ом | |||||||||||||||
|
| Сззс | 0,01 мк | 1 | 8,2 мкФ | |||||||||||||||
|
| Сззш | 0,01 мк | 1 | 8,2 мкФ | |||||||||||||||
|
| VS1,2 | КД 522Б | 2 | Umax = 40 B | |||||||||||||||
|
|
| ЕАРМ 502.001.000 СП | |||||||||||||||||
| Зм. | Лист | № докум. | Підпис | Дата | |||||||||||||||
| Виконав |
| Специфікація | Літ. | Лист | Листів | ||||||||||||||
| Перевір. |
|
| н |
| 1 | 1 | |||||||||||||
| Н. контр. |
|
| |||||||||||||||||
| Затв. |
| ||||||||||||||||||








