 2020-04-20
2020-04-20 486
486
Функціональна і структурна схеми контуру регулювання швидкості наведені в додатках.
Передавальна функція замкнутого контуру, з урахуванням вище розрахованих параметрів, визначається так:

У структурній схемі струмів контур і виконавчий механізм складають об'єкт регулювання для контуру швидкості
Для досягнення підвищеної швидкодії контуру регулювання швидкості, налагоджуємо його на симетричний оптимум.
При цьому в якості регулятора швидкості застосовуємо ПІ-регулятор, передавальна функція якого має вигляд
 ;
;
При стандартній настройці на симетричний оптимум регулятора швидкості приймаємо:
Тр.ш = 8×Тm = 8×0,01 = 0,08 с.
Кр.ш =  .
.
Деаш – швидкодія контуру регулювання швидкості (значна).
Кззш – коефіцієнт зворотного зв'язку за швидкістю:
(Приймаємо Uзш.ном=10 В.)
 ;
;
 ;
;
Кр.ш =  ;
;
 .
.
Значення пасивних елементів зворотного зв’язку знаходимо із співвідношень:
Трш = Rзш×Сззш;ТМ = Rпззш×Сззш;
Де Rпззш – опір у ланцюзі зворотного зв'язку ПІ-регулятора швидкості.
Приймаємо Сззш = 8,2 мкФ, тоді
 кОм;
кОм;
 кОм;
кОм;
 кОм.
кОм.
Через мале перерегулювання (4,3%) перехідні процеси оптимізованого контуру струму близькі до аперіодичного і тому передавальна функція має вигляд більш простої передавальної функції аперіодичної ланки:
У цьому випадку передавальна функція розімкненого контуру швидкості має вигляд:



Регулятор швидкості компенсував велику сталу часу ТМ і динамічні властивості контуру швидкості визначаються лише меншою сталою часу Тm. Передавальна функція замкненого контуру швидкості має вигляд:


Наявність форсуючої ланки в передавальній функції приводить до великого пере регулювання, яке може досягати 43%. Пере регулювання можна зменшити до 8%, якщо на вхід оптимізованого контуру швидкості додати аперіодичний фільтр зі сталою часу Тф = 8Тm, що здатний компенсувати форсуючу ланку в передавальній функції. Тоді передавальна функція замкненого контуру швидкості отримає вигляд:

Механічна характеристика синтезованого приводу зображена на рис. 3:

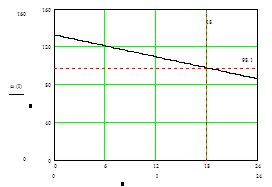
Рис. 3. Електромеханічна характеристика синтезованого електроприводу
Структурна схема контуру регулювання швидкості наведена в додатках








