 2020-04-12
2020-04-12 127
127
Таблица 23.1. Параметры для расчёта
| Напряжение питания цепи якоря, В | Резистивное сопротивление обмотки якоря и возбуждения, Ом | Добавочное сопротивление цепи якоря, Ом | Коэффициент α между КФ и током якоря |
| 150 | 0,6 | 0,2 | 0,03 |
Рассмотрим построение естественной и искусственной ЭМХ электропривода (ЭП) с двигателем постоянного тока с последовательным возбуждением (ДПТ с ПВ) при изменении величины сопротивления цепи якоря Rя сумм.
Построение семейства ЭМХ осуществим в соответствии с уравнением
 ,
,
где  – угловая скорость электрического двигателя (ЭД), рад/с;
– угловая скорость электрического двигателя (ЭД), рад/с;
U – напряжение, подаваемое к цепи якоря ЭД, В;
Iя – ток якоря ЭД, А;
Rя – сопротивление обмотки якоря ЭД, Ом;
Rдоб – добавочное сопротивление в цепи якоря ЭД, Ом;
Rя сумм =  = (Rя +
= (Rя +  Rдоб)) – суммарное сопротивление цепи якоря ЭД Ом;
Rдоб)) – суммарное сопротивление цепи якоря ЭД Ом;
К – коэффициент, зависящий от геометрических и обмоточных данных ЭД;
Ф – магнитный поток возбуждения ЭД, Вб.
Магнитный поток ЭД с последовательным возбуждением создается током, являющимся током якоря. Для вычисления величины  рекомендуется использовать формулу
рекомендуется использовать формулу  . Вычисления скорости двигателя при построении ЭМХ ДПТ с последовательным возбуждением производим для положительных значений тока и не равных нулю (при расчете Iя изменяется от 0 А до 3000 А с дискретностью 20 А).
. Вычисления скорости двигателя при построении ЭМХ ДПТ с последовательным возбуждением производим для положительных значений тока и не равных нулю (при расчете Iя изменяется от 0 А до 3000 А с дискретностью 20 А).
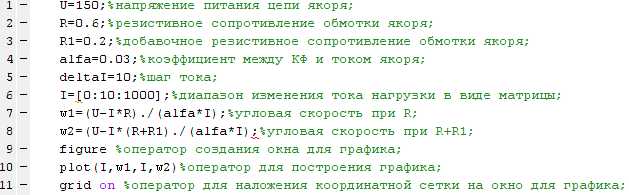
Рис.23.1. Параметры расчёта угловой скорости
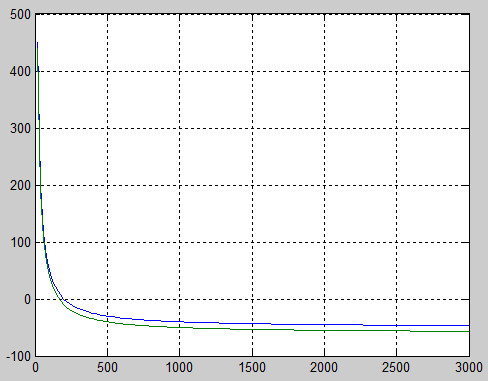
Рис.23.2. Результат моделирования ЭМХ ДПТ с ПВ при изменении величины сопротивления цепи якоря








