 2020-04-12
2020-04-12 227
227
Таблица 21.1. Параметры для расчёта
| Напряжение питания цепи якоря, В | Резистивное сопротивление обмотки якоря, Ом | Добавочное сопротивление в цепи якоря, R1ДОБ, Ом | Добавочное сопротивление в цепи якоря, R2ДОБ, Ом | Добавочное сопротивление в цепи якоря, R3ДОБ, Ом |
| 440 | 0,15 | 0,2 | 0,6 | 1,0 |
Рассмотрим построение семейства естественной и искусственных (реостатных) электромеханических характеристик (ЭМХ) электропривода (ЭП) с двигателем постоянного тока независимого возбуждения (ДПТ с НВ) при изменении величины сопротивления цепи якоря Rя сумм.
Построение ЭМХ осуществим в соответствии с уравнением
 ,
,
где  – угловая скорость электрического двигателя (ЭД), рад/с;
– угловая скорость электрического двигателя (ЭД), рад/с;
U – напряжение, подаваемое к цепи якоря ЭД, В;
Iя – ток якоря ЭД, А;
Rя – сопротивление обмотки якоря ЭД, Ом;
Rдоб – добавочное сопротивление в цепи якоря ЭД, Ом;
Rя сумм =  = (Rя +
= (Rя +  Rдоб)) – суммарное сопротивление цепи якоря ЭД Ом;
Rдоб)) – суммарное сопротивление цепи якоря ЭД Ом;
К – коэффициент, зависящий от геометрических и обмоточных данных ЭД;
Ф – магнитный поток возбуждения ЭД, Вб.
КФ имеет размерность В  = Вб. Если магнитный поток является номинальным Фн, то КФн называется постоянной двигателя С. Пусть величина «КФ» изменяется от 1 В до 2 В (значения «КФ» приняты равными 1; 1.5; 2 В*сек).
= Вб. Если магнитный поток является номинальным Фн, то КФн называется постоянной двигателя С. Пусть величина «КФ» изменяется от 1 В до 2 В (значения «КФ» приняты равными 1; 1.5; 2 В*сек).
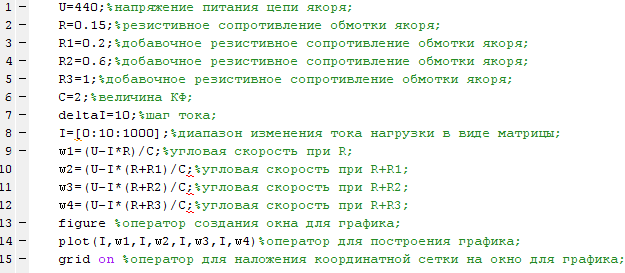
Рис.21.1. Программа расчёта угловых скоростей
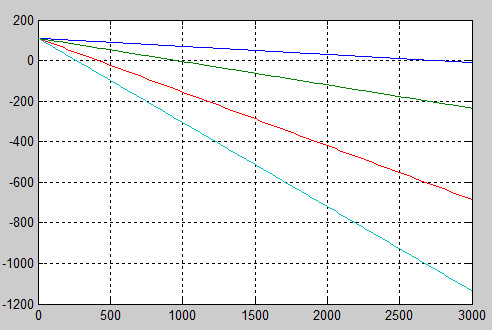
Рис.21.2. Результат моделирования ЭМХ ДПТ с НВ при изменении величины сопротивления цепи якоря








