 2020-04-12
2020-04-12 228
228Способ управления стартером плавным уменьшением его потока широко применяют при запуске авиадвигателей от СТГ. При этом способе поток на втором этапе запуска двигателя плавно уменьшают. При этом возрастает угловая скорость и обеспечивается надежное сопровождение авиадвигателя до конца запуска. Уменьшение потока, как и при его ступенчатом изменении, должно начинаться при угловой скорости ω1, достаточно близкой ω01= U /(C Ф1). Если поток начать снижать слишком рано, угловая скорость может упасть, а не возрасти. Поток возбуждения стартера, начиная с угловой скорости ω1 уменьшают по такому закону, который при нарастании угловой скорости обеспечил бы постоянство противо-э.д.с. машины Е =СωФ=const. При соблюдении этого условия поток возбуждения должен изменяться обратно пропорционально угловой скорости привода Ф= Е /(С ω), а ток якоря в процессе регулирования изменением потока должен оставаться постоянным, т. е.
I А =(U- СωФ)/ R А= const.
Постоянство тока и противо-э.д.с. означает и постоянство электромагнитной мощности Р Э= ЕI А=const. Поскольку при I А = const электрические потери в якоре постоянны  , а магнитные потери вследствие уменьшения потока при увеличении угловой скорости меняются незначительно, считают, что такой закон изменения потока обеспечивает и приблизительное постоянство потребляемой мощности:
, а магнитные потери вследствие уменьшения потока при увеличении угловой скорости меняются незначительно, считают, что такой закон изменения потока обеспечивает и приблизительное постоянство потребляемой мощности:
 ,
,
где  - механические потери.
- механические потери.
При работе с постоянным потоком максимальная электромагнитная мощность стартера достигается при t 1=0,69 Т М, что соответствует угловой скорости ω≈0,5ω0. Диаграммы тока якоря, потока возбуждения и угловой скорости стартера (в о.е.) приведены на рис. 13.4,а.
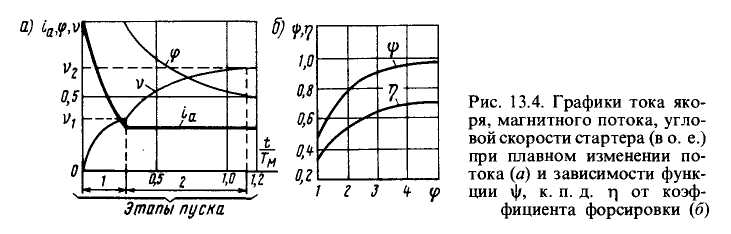
При постоянном напряжении питания якоря и максимальном потоке возбуждения стартера Ф1=const система стартер - ротор ГТД разгоняется до угловой скорости ω1. Начиная с момента времени t 1, соответствующего угловой скорости ω1 поток возбуждения уменьшают таким образом, чтобы выполнялись условия Е = С ωФ=const и 1 А=const.
Поток на втором этапе запуска снижают от его форсированного значения Ф1до номинального значения, соответствующего угловой скорости ω2 в момент отключения стартера. Из условия постоянства противо-э.д.с. и тока якоря при работе на втором этапе запуска следует, что поток в функции от угловой скорости меняется по закону Ф(ω)=ФН(ω2/ω), где ω2 - конечная угловая скорость стартера; ω - текущее значение угловой скорости. Максимальное значение потока равно Ф1(ω)=ФН(ω2/ ω2).
Электроэнергия, потребляемая стартером при запуске, равна суммарной энергии, которую стартер потребляет на первом и втором этапах запуска:
 .
.
Используя уравнение движения привода М - M С =J (dω/d t), выражая ток в виде
ia= [ J /(С Ф)](dω/d t), и учитывая, что U =Сω0ФПОТ, выражение для электроэнергии, израсходованной при запуске, записывают так:
 .
.
Функция А Э = f (ω0)экстремума не имеет.
Запасенная системой в процессе разгона кинетическая энергия
 .
.
К. п. д. запуска при этом способе управления определяют из соотношения:
 . (13.3)
. (13.3)
Так как на этапе регулирования потоком между значениями угловой скорости и потока должно выполняться соотношение ω2/ω1 = Ф1/Ф2, то выражение (13.3) переписывают в виде:
 ,
,
где  - коэффициент форсировки потока.
- коэффициент форсировки потока.
Значение функции  при коэффициентах формировки потока φ =2-3 возрастает довольно быстро, однако дальнейшее увеличение коэффициента форсировки (φ >3) не вызывает быстрого возрастания функции ψ (рис. 13.4, б). Поэтому в реальных системах запуска делают обычно φ =2.5-3. Поскольку ω2/ω1= 0,7, то
при коэффициентах формировки потока φ =2-3 возрастает довольно быстро, однако дальнейшее увеличение коэффициента форсировки (φ >3) не вызывает быстрого возрастания функции ψ (рис. 13.4, б). Поэтому в реальных системах запуска делают обычно φ =2.5-3. Поскольку ω2/ω1= 0,7, то  . Полученная зависимость η = f (φ) позволяет выбрать значение φ, эффективно влияющее на к. п. д.
. Полученная зависимость η = f (φ) позволяет выбрать значение φ, эффективно влияющее на к. п. д.
Время запуска определяют как сумму интервалов времени при работе на первом и втором этапах пуска t П= t 1+ t 2 -Значение t 1 определяют, используя выражение:
ω1= ω01 [1-eхр(- t 1 /T M)],
где  ;
;
 ;
;
Время t 2запуска на втором этапе определяют из уравнения движения системы:
С I АФ =J (dω/d t), где Ф = ФН(ω2/ ω); I А = (U - С ω Ф/ R А) = const.
Используя законы изменения Ф и I А в уравнении движения привода с учетом того, что U= С ωоФн, получают
 или
или  ,
,
откуда
 .
.
При φ = 2 к.п.д. запуска η = 0.56, время пуска t П= t 1+ t 2= 1,17 Т М.
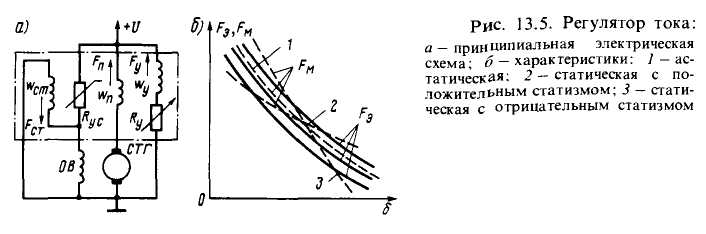
Для плавного изменения потока возбуждения стартера применяют угольный регулятор тока РУТ-600. Основной рабочей обмоткой регулятора тока является его последовательная (токовая) обмотка w П (рис. 13.5, а), по которой проходит весь ток якоря стартера. В отличие от регулятора напряжения электромагнитная сила F П последовательной обмотки сжимает угольный столб, а реакция пружины F ПР ослабляет сжатие. Управляющая обмотка w У служит для постройки регулятора на нужное значение тока якоря стартера; ее электромагнитная сила F, тоже сжимает угольный столб. Когда регулятор включен, любое отклонение тока якоря СТГ от значения, установленного при настройке, приводит к изменению силы F П. В результате изменяются сжатие угольного столба и его сопротивление R УС, ток возбуждения СТГ и его противо-э.д.с. Е = С ωФ. Плотность и значение приращения противо-э.д.с. таковы, что их воздействие устраняет отклонение тока (с определенной статической ошибкой) от его значения, установленного при настройке. В системе запуска с плавным изменением потока возбуждения возможно возникновение неустойчивого режима вследствие особенностей параметров регулятора. Точность стабилизации тока в первую очередь определяется чувствительностью регулятора и цепи возбуждения, которую характеризуют коэффициенты передачи электромагнита к ЭМ = (дF Э /дi p)0, угольного столба К УС=(дК УС /д δ)0регулятора и К В=(дi В /дR УС)0обмотки возбуждения (здесь i Р= i А+ w У i У/ w П - суммарный ток электромагнита регулятора; δ - воздушный зазор).
С увеличением чувствительности регулирование приближается к астатическому, но уменьшается запас устойчивости системы. Учитывая, что характеристики реальных угольных регуляторов (рис. 13.5, б) близки к астатическим, не исключена опасность неустойчивой работы. Для повышения устойчивости в регулятор тока вводят ОСС по току возбуждения СТГ, используя специальную обмотку стабилизации w CT, включенную на падение напряжения на обмотке возбуждения. Сила электромагнита F Э= F П+ F У- F СТ.








