 2020-04-12
2020-04-12 1172
1172Устройство. В состав гидроусилителя любого типа входят (рис. 1):
а. источник энергии;
б. распределитель;
в. исполнительный механизм;
г. соединительные трубопроводы.
Источником энергии в системе гидроусилителя является гидронасос. Наиболее распространены пластинчатые и шестеренные насосы. Они обеспечивают в автоматическом режиме требуемые расходы и давление, их привод осуществляется от двигателя автомобиля.
Распределитель (клапан управления) осуществляет подвод энергии жидкости под давлением исполнительному механизму.
Исполнительный механизм – гидроцилиндр, преобразует энергию жидкости в усилие, передающееся на управляемые колеса.
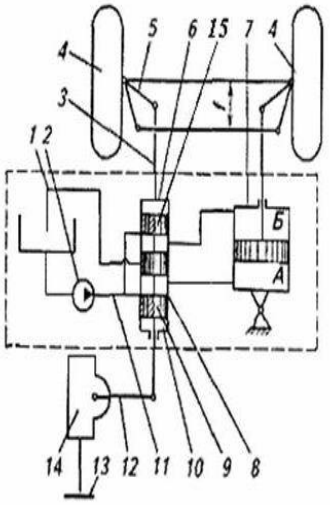
Рисунок 1 - Схема общего устройства рулевого управления с гидроусилителем.
1 – сливная магистраль; 2 – гидронасос; 3 – тяга; 4 – управляемые колёса; 5 – рычаг; 6 – реактивная камера; 7 – гидроцилиндр; 8 – распределитель; 9 – золотник; 10 – реактивная камера; 11 – нагнетательная магистраль; 12 – сошка; 13 – рулевое колесо; 14 – рулевой механизм; 15 – золотник. А, Б – полости гидроцилиндра.
Принцип работы. При повороте рулевого колеса, например, вправо, сошка 12 рулевого механизма 14 повернется по ходу часовой стрелки и сместит золотник 9 распределителя 8 назад по отношению к принятому направлению движения автомобиля. В результате жидкость от насоса 2 подается через распределитель в полость А и гидроцилиндр 7 начинает поворачивать управляемые колеса 4 вправо. При этом полость Б цилиндра соединена со сливной магистралью 1.
После прекращения поворота рулевого колеса управляемые колеса под давлением рабочей жидкости на поршень цилиндра продолжают поворачиваться направо. Под действием рычага 5 и тяги 3 корпус распределителя смещается назад и перекрывает доступ жидкости в полость А цилиндра усилителя. Поворот управляемых колес прекращается. Таким образом, управляемые колеса поворачиваются в соответствии с поворотом рулевого колеса. Кинематическое следящее действие придает обратная связь (рычаг 5 и тяга 3), которой управляемые колеса соединяются с корпусом распределителя. Силовое следящее действие достигается введением реактивных элементов: камер или плунжеров. В приведенной схеме силовое слежение достигается с помощью реактивных камер 6 и 10, в которые через калиброванные отверстия поступает жидкость из нагнетательной магистрали 11. Она воздействует на верхний или нижний торец золотника 9 в зависимости от направления движения автомобиля. В результате усилие, необходимое для смещения золотника, зависит от давления в нагнетательной магистрали 11, которое, в свою очередь, определяется моментом сопротивления повороту управляемых колес.
Усилитель может вступать в работу не только под действием сил от рулевого колеса, но и от сил, передаваемых от управляемых колес. Предположим, что от толчка управляемое колесо повернулось вправо. Вследствие обратной связи колеса 4 через рычаг 5 и тягу 3 с корпусом распределителя 8, последний перемещается относительно неподвижного золотника вниз (по рисунку) и жидкость от насоса подастся в полость Б гидроцилиндра. В результате жидкость под давлением создаст препятствие для поворота колеса вправо. Таким образом, усилитель удерживает колеса в положении, соответствующем положению рулевого колеса. Чтобы исключить включение усилителя при действии незначительных сил со стороны управляемых колес в распределителе в полостях 6 и 10 устанавливают центрирующие пружины. И если сила со стороны колес на распределитель меньше усилия предварительного сжатия пружин, то распределитель не включается в работу, кроме того, самопроизвольному включению усилителя препятствует давление жидкости в реактивных камерах 6 и 10.
Схемы компоновки. В зависимости от относительного расположения элементов различают 4 схемы компоновки гидроусилителей (рис. 2).

Рисунок 2 - Схемы компоновки гидроусилителей.
1- распределитель; 2- гидроцилиндр; 3- рулевой механизм.
На первой схеме распределитель, гидроцилиндр и рулевой механизм выполнены в едином блоке (рис. 2,а). Эта схема компактна, имеет минимальное число шлангов, не склонна к автоколебаниям из-за высокой жесткости гидравлических магистралей. Но здесь весь рулевой привод нагружается усилием от гидроцилиндра, приложенным к валу сошки.
Во второй схеме (рис. 2,б), распределитель объединен в блок с рулевым механизмом, а гидроцилиндр расположен отдельно. Здесь привод не нагружен усилием от гидроцилиндра. Он имеет малую склонность к автоколебаниям, легко компонуется, гидроцилиндр, расположенный близко к управляемым колесам воспринимает динамические нагрузки при ударах.
На третьей схеме (рис. 2,в) распределитель и гидроцилиндр объединены, а рулевой механизм расположен отдельно. В этом случае гидроцилиндр нужно располагать в строгом соответствии с рулевым механизмом, так как шаровой палец сошки должен управлять работой распределителя.
На четвертой схеме (рис. 2,г) рулевой механизм, распределитель и силовой цилиндр размещены автономно. Эта схема наиболее гибка с точки зрения компоновки и унификации элементов, но имеет много соединительных элементов и склонна к автоколебаниям.

