 2020-04-12
2020-04-12 162
162
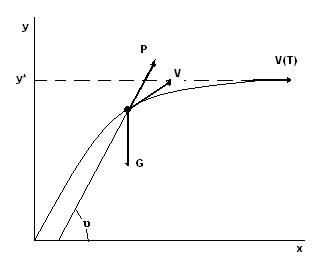
Допущения: – аэродинамические силы отсутствуют;
– гравитационное поле – плоско-параллельное;
– планета не вращается.
Модель движения в начальной стартовой системе координат:




 ,
,


где h – высота;
m – масса ЛА;
P – сила тяги двигателя;
J – удельный импульс;
β – секундный расход топлива;
βm – максимально возможный расход топлива;
g – ускорение силы тяжести;
g0 – ускорение силы тяжести на поверхности планеты;
RP – радиус планеты.
Программа управления задана в параметрической форме  .
.
Требуется найти параметры  ,
,  ,
,  обеспечивающие выход взлетной ступени на круговую орбиту вокруг Луны при минимальных затратах топлива.
обеспечивающие выход взлетной ступени на круговую орбиту вокруг Луны при минимальных затратах топлива.
Исходные данные – взлетная ступень лунного модуля должна выйти на орбиту командного модуля Аполлон.
.
Оптимизация траектории движения носителя
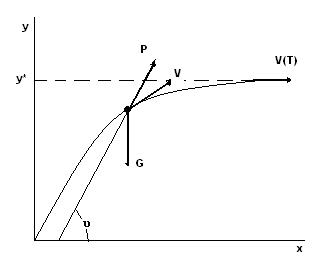
Допущения: – аэродинамические силы отсутствуют;
– гравитационное поле – плоско-параллельное;
– планета не вращается.
Модель движения в начальной стартовой системе координат:




 ,
, 


где h – высота;
m – масса ЛА;
P – сила тяги двигателя;
J – удельный импульс;
β – секундный расход топлива;
βm – максимально возможный расход топлива;
g – ускорение силы тяжести;
g0 – ускорение силы тяжести на поверхности планеты;
RP – радиус планеты.
Используя необходимые условия оптимального управления, найти программы управления вектором тяги  и расходом топлива,
и расходом топлива,  , которые обеспечат выход взлетной ступени на круговую орбиту вокруг Луны при минимальных затратах топлива.
, которые обеспечат выход взлетной ступени на круговую орбиту вокруг Луны при минимальных затратах топлива.
Исходные данные – взлетная ступень лунного модуля проекта Н1- Л3 должна выйти на орбиту командного модуля.








