 2020-05-12
2020-05-12 365
365Кинематическая структура станков прежде всего делится на три класса: класс Э - элементарная структура, состоящая только из простых кинематических групп; класс С - сложная структура, со сложными кинематическими группами; класс К - комбинация простых и сложных кинематических групп.
Внутри каждого класса структуры станка отличаются кинематическими группами формообразования и числом исполнительных пар, входящих в группу.
Типовые кинематические структуры различаются в основном характером применяемых кинематических групп - только простых, только сложных или тех и других; числом кинематических групп формообразования: числом исполнительных кинематических пар в этих группах.
Например, структура класса С1 состоит из одной сложной группы формообразования и отличается числом исполнительных пар, входящих в эту группу - от двух до четырех пар.
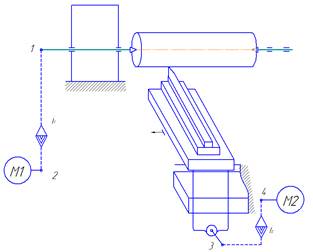
Примерами применения такой структуры могут служить: винторезный станок для цилиндрической резьбы со структурой С12 (рис.4), имеющий во внутренней связи одну кинематическую цепь 1 - 2 с гитарой ix.
Станки со структурой С1 всегда имеют только один двигатель, состоят из одной группы движения резания, не имеют группы подачи, а точность формы образуемой поверхности зависит не только от точности исполнительных пар, но и от точности внутренней кинематической связи.

Рисунок 4 – Кинематическая структура токарно-винторезного станка (С12).
В станках с двумя и тремя сложными группами точность формы образуемой поверхности зависит как от точности формы довольно большого числа исполнительных кинематических пар, так и от кинематической точности не одной, а двух и трёх кинематических групп.
Кинематические структуры создают заданные движения, определяемые чисто кинематическими факторами, такими, как траектория, путь, скорость, направление и исходное положение движения. Остальные кинематические факторы (степень универсальности, кинематическая точность, динамика, шероховатость обработанных поверхностей и т.д.) обычно обеспечиваются конструкцией станка и технологией его изготовления. Однако достичь желаемых результатов удается не всегда только этими приемами, а если и удается их получить, то в результате большого увеличения стоимости изготовления. Легче обеспечить выполнение поставленных требований в отношении степени универсальности станка, его производительности, точности, изменив типовую структуру станка.
Контрольные вопросы
1 Как получить поверхность геометрически и на металлорежущих станках?
2 Какими методами можно получить производящие линии?
3 Какие движения относятся к формообразующим? Какими они могут быть в различных станках?
4 Какие движения в станках называются исполнительными? Как они классифицируются?
5 Какими бывают исполнительные органы?
6 Что такое «кинематическая группа»? Какими они бывают?
7 Что такое «орган настройки»? Какими они бывают? Как обозначаются на схемах?
8 Что такое «кинематическая структура»? Какими бывают кинематические структуры?
9 Определить структуру станка
 |
Э22
УРОК N3
ТЕМА УРОКА: Приводы металлорежущих станков
ЦЕЛИ УРОКА:
Дидактическая: создание условий для формирования знаний о различных типах приводов металлорежущих станков; передаточных отношениях различных кинематических пар, составляющих привод; о геометрическом ряде частот вращения шпинделя, двойных ходов, подач в станках, для формирования понятий о лучевых и логарифмических диаграммах, о способах их построения и определения по ним режимов резания.
Воспитательная: воспитание познавательного интереса, обращение внимания студентов на важность владения правильными приёмами оформления, рациональных записей.
Развивающая: развитие творческой активности в процессе изучения темы, познавательного интереса к новому материалу.
ОСНАЩЕНИЕ УРОКА:
1 ММК
2 Модели передаточных механизмов
ОБРАЗОВАТЕЛЬНЫЕ ТЕХНОЛОГИИ: беседа с элементами демонстрации, с привлечением студентов к изучению новой темы, анализом конкретных ситуаций, информационно-комуникационные, здоровьесберегающие.
ВИД ЗАНЯТИЯ: урок
ПЛАН УРОКА:
1 Назначение и типы приводов
2 Передаточные отношения различных кинематических пар
3 Ряды частот вращения шпинделя, подач, двойных ходов
4 Лучевая диаграмма
5 Логарифмическая диаграмма








