 2020-08-05
2020-08-05 322
322Управление в биотехнических системах
Лекции. Часть 1.
Оглавление
Введение 2
1. Системы управления 2
1.1. Структура системы 2
1.2. Математическое моделирование 6
1.2.1. Линеаризация уравнений. Линейность и нелинейность 8
1.2.2. Алгебраические уравнения 9
1.2.3. Дифференциальные уравнения 11
1.2.4. Модели в пространстве состояний 15
1.2.5. Переходная функция 18
1.2.6. Импульсная характеристика (весовая функция) 19
1.2.7. Преобразование Лапласа 21
1.2.8. Передаточная функция 22
1.3. Типовые динамические звенья 25
1.3.1. Структурные схемы 27
1.4. Анализ систем управления 30
1.4.1. Устойчивость. 31
1.5. Критерии устойчивости 35
1.5.1. Критерий Гурвица 35
Термодинамика идеальных газов и смесей 37
2.1. Основные положения 38
2.2. Основные законы и термическое уравнение состояния идеальных газов 40
2.3. Математические формулы для определения состояния идеальных газов и смесей 42
2.4. Свойства газовых смесей 43
2.5. Термодинамические процессы идеальных газов 46
Введение
Теория автоматического управления (ТАУ) один разделов кибернетики, изучающей п роцессы преобразования информации в сложных управляющих системах. Предметом изучения ТАУ свойства, методы расчета и конструирования систем автоматики с обратными связями. Как любая теория, она имеет дело не с реальными инженерными конструкциями, а с их моделями. Принципы ТАУ можно успешно применять не только в технике, но и в биологии, экономике, общественных науках. Кроме классических задач регулирования, она занимается также оптимизацией законов управления, вопросами приспособляемости (адаптации).
Системы управления
СЛАЙД 1 В задачах управления всегда есть два объекта: объект управления (ОУ) и управляющее устройство или регулятор (Р), который сравнивает выход управляемого объекта с желаемым и в зависимости от результата вырабатывает управляющий сигнал на объект.
Обычно регулятор действует на ОУ не прямо, а через исполнительные механизмы (приводы), усиливающие и преобразующие сигнал управления. Кроме того, качество управления можно улучшить, измерять внутренние свойства объекта с помощью датчиков.
К переменным характеризующим объект управления (рис. 1.) относятся: управляющие воздействия  , выходные переменные
, выходные переменные  , переменные состояния
, переменные состояния  , причем
, причем  ; возмущающие воздействия
; возмущающие воздействия  .
. 
Все переменные, которые характеризуют объект, удобно представить в векторной форме:
 ,
,  ,
,  ,
,  .
.
Входные воздействия на систему (или задание на регулятор) будем обозначать буквой v:
В дальнейшем для указания соответствующих векторных величин будем использовать обозначения:  ,
,  ,
,  ,
,  ,
,  ,
,  – m -мерное вещественное линейное пространство.
– m -мерное вещественное линейное пространство.
Структура системы
СЛАЙД 2. На рис. 2 изображена функциональная схема САУ, на которой показаны основные составные части управляющего устройства (УУ): чувствительное устройство (ЧУ), вычислительное устройство (ВУ) и исполнительное устройство (ИУ). В самом общем случае на вход УУ, помимо ЗВ поступает также информация о текущем состоянии объекта в виде выходной величины (ВВ) и о действующем на объект возмущении F. УУ перерабатывает получаемую информацию по определенному заложенному в нем алгоритму (закону). В результате на его выходе возникает управляющее воздействие. 
В типичную систему управления входят объект, регулятор, исполнительные механизмы и датчики. На объект действует окружающая среда - внешние возмущения, носящие случайный характер и мешающие регулятору выполнять задачу. Датчики измеряют параметры не точно, а с некоторой ошибкой. В этом случае говорят о «шумах измерений» по аналогии с шумами в радиотехнике, которые искажают сигналы. Регулятор сравнивает задающий сигнал («задание», «уставку», «желаемое значение») с сигналами обратной связи от датчиков и определяет рассогласование (ошибку управления) - разницу между заданным и фактическим состоянием. Если ошибка управления нулю, управления не требуется. Если есть разница, регулятор выдает управляющий сигнал, который стремится свести рассогласование к нулю. Поэтому схему регулятора управления по ошибке или управлению можно изобразить на рис. 
Для того, чтобы регулятор начал действовал, чтобы управляемая величина должна отклонится от заданного значения. В простейшем случае в нем из заданного значения вычитается сигнал обратной связи (измеренное значение).
В реальных системах управлять объектом из-за внешних воздействий и шумов, которые заранее неизвестны, без ошибки нельзя. Кроме того, объекты управления обладают инерционностью, то есть, не могут мгновенно перейти из одного состояния в другое. Возможности регулятора и приводов (то есть мощность сигнала управления) всегда ограничены, поэтому быстродействие системы управления (скорость перехода на новый режим) также ограничена
СЛАЙД 3. Классификацию САУ можно провести по ряду существенных с точки зрения ТАУ, принципов:
1. По принципу регулирования: разомкнутые, замкнутые и комбинированные системы
В разомкнутых САУ отсутствует обратная связь между выходом объекта и входом УУ, при наличии которой объект и УУ образуют замкнутый контур, ВВ не измеряется, т. е. нет контроля за состоянием объекта. Возможны разомкнутые САУ, в которых УУ измеряет только одно ЗВ, одно возмущение F и, наконец, оба эти сигнала одновременно.
В замкнутых САУ на вход управляющего устройства подаются ЗВ и ВВ объекта. Исходя из величины ЗВ, УУ определяет соответствующее требуемое значение ВВ и, имея информацию о текущем значении ВВ, обеспечивает необходимое соответствие между ВВ и ЗВ путем воздействия на объект.
В такой САУ УУ стремится ликвидировать все отклонения ВВ, независимо от причин, вызвавших эти отклонения, включая любые возмущения, внешние и внутренние помехи, а также изменения параметров системы.
Как видно из рис. 2, САУ такого типа представляют собой замкнутый контур, образованный объектом и УУ. При этом управляющее устройство создает обратную связь вокруг объекта, связывая его выход со входом. Поэтому еще замкнутые САУ называются системами с обратной связью или системами управления по отклонению. Эти системы могут обеспечить принципиально неограниченную точность управления и представляют собой основной тип САУ но, склонны к потере устойчивости, что чаще всего проявляется в возникновении расходящихся колебаний (генерации).
Комбинированные САУ представляют собой объединение в одну систему замкнутой системы управления по отклонению и разомкнутой системы управления по внешнему воздействию. Показанная на рис. 2 схема является схемой такой комбинированной САУ. Добавление к замкнутой системе управления разомкнутой системы компенсации влияния на выходную величину объекта какого-либо возмущения облегчает задачу замкнутой САУ и тем самым позволяет упростить ее и повысить точность управления. Лучшее качество управления в комбинированных системах объясняется тем, что в них наиболее полно используется информация об объекте и внешней ситуации.
2. По цели регулирования в зависимости от характера задающего воздействия САУ делятся на три вида: системы стабилизации - задающее воздействие постоянно, системы программного управления - задающее воздействие по заранее заданному закону и следящие системы - задающее воздействие изменяется по заранее неизвестному закону изменения. Частным, но широко распространенным видом систем САУ являются системы автоматического регулирования (САР). Задача САР заключается в поддержании ВВ объекта на заданном уровне ЗВ.
3. В зависимости от количества выходных координат объекта управления, образующих вектор ЗВ, САУ делятся на одномерные и многомерные.
Многомерные САУ (и САР), в свою очередь, делятся на системы связанного и несвязанного управления (регулирования). Система связанного управления - отдельные управляющие устройства связаны друг с другом внешними связями. Система несвязанного управления имеет несколько управляющих устройств, каждое из которых осуществляет управление по своей выходной координате. При этом все эти устройства не имеют взаимных связей. Последнее, однако, не исключает возможности влияния управляющих устройств через объект управления или, например, общий источник питания.
Входящая в состав как связанной, так и несвязанной многомерной системы управления отдельная система управления называется автономной, если управляемая ею выходная координата объекта не зависит от значений остальных его координат, так что изменение последних не вызывает изменения этой координаты.
4. По типу математического описания: линейные и нелинейные системы. Линейной называется система, которая описывается линейными уравнениями. Чтобы система была нелинейной, достаточно иметь в ее составе хотя бы одно нелинейное звено, т. е. звено, описываемое нелинейным уравнением.
5. По характеру параметров стационарные и нестационарные системы. Стационарной называется система, все параметры которой не изменяются во времени. Нестационарная система — это система с переменными параметрами. При математическом описании нестационарной системы это проявляется в том, что некоторые коэффициенты дифференциального уравнения системы являются функциями времени. В соответствии с данным определением, в отличие от нестационарной системы, реакция стационарной системы на одно и то же воздействие не зависит от момента приложения этого воздействия.
6. В зависимости от характера действия составляющих систему звеньев: непрерывного или дискретного действия. Система непрерывного действия, или, непрерывная система, состоит только из звеньев непрерывного действия, т. е. звеньев, выходная величина которых изменяется плавно при плавном изменении входной величины. Система дискретного действия, или дискретная система — это система, содержащая хотя бы одно звено дискретного действия, выходная величина которого изменяется скачками, даже при плавном изменении входной величины. (Скачки выходной величины могут происходить либо при прохождении входной величиной определенных пороговых значений - звено релейного действия, либо через определенный интервал времени - звено импульсного действия.)
7. Адаптивные, или самоприспосабливающиеся, системы обладают способностью приспосабливаться к изменению внешних условий работы, а также улучшать свою работу по мере накопления опыта. Неадаптивные, или, как их еще называют, обыкновенные, системы такой способностью не обладают. Они имеют постоянную настройку. Если вследствие какого-либо изменения условий работы обыкновенной системы ее настройку требуется изменить для того, чтобы сохранить заданное качество управления (например, точность, быстродействие), эту перенастройку должен сделать человек. В случае адаптивной системы это осуществляется автоматически самим УУ.
8. В зависимости от числа входных и выходных переменных выделяют:
одноканальные объекты (или системы) – объекты, в которых есть только одна выходная переменная ( =1);
=1);
многоканальные (многосвязные, многомерные, взаимосвязанные) объекты (или системы) – объекты, в которых число выходных переменных больше единицы ( >1)
>1)
Математическое моделирование
СЛАЙД 4. Цель управления изменение состояния объекта в соответствии с заданием. Для этого необходимо знать, как система управления будет реагировать на разные воздействия, то есть нужна модель системы: объекта, привода, датчиков, каналов связи, возмущений, шумов.
В ТАУ рассматриваются не физические системы управления, а их математические модели, использующие для изучения другого объекта управления (оригинала). Поэтому необходимо стремиться к тому, чтобы эта модель достаточно адекватно отражала свойства реального устройства. Процедуру получения математической модели объекта можно разбить на следующие этапы:
1. Составление гносеологической (мысленной) модели объекта. Разрабатывается приближенная модель объекта, которая в дальнейшем модифицируется, исходя из требований технического задания и режимов работы.
2. Определение независимых переменных, которые характеризуют объект, и уточнение их размерностей. При этом число управляющих воздействий не может быть меньше числа выходных переменных  . Размерность вектора переменных состояния не может быть меньше размерности вектора выходных переменных
. Размерность вектора переменных состояния не может быть меньше размерности вектора выходных переменных  . Размерность возмущающих воздействий
. Размерность возмущающих воздействий  может быть произвольной и никак не связана с размерностью
может быть произвольной и никак не связана с размерностью  ,
,  ,
,  .
.
3. Запись физических законов, в силу которых развиваются процессы в объекте.
4. Приведение уравнений объекта к удобному с точки зрения ТАУ виду.
При составлении математической модели приходится искать компромиссный вариант между двумя противоречивыми требованиями: с одной стороны, модель должна наиболее полно отражать свойства реальной системы, с другой быть простой, не затрудняющей исследований. При составлении математической модели всегда делают какие-либо допущения и упрощения. Поэтому для одной и той же системы в зависимости от целей управления модели могут быть различными. Математическая модель может быть получена:
1. Теоретически из законов физики (законы сохранения массы, энергии, импульса).
2. В результате наблюдения за объектом при различных входных сигналах - идентификации. Объект рассматривается как «черный ящик», то есть, его внутреннее устройство неизвестно. Определяется реакция на входные сигналы и модель строится так, чтобы выходы модели и объекта совпадали как можно точнее при разнообразных входах.
На практике часто используется смешанный способ: структура модели (вид уравнения, связывающего вход и выход) определяется из теории, а коэффициенты находят опытным путем.
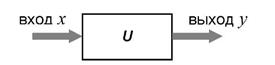
СЛАЙД 5. Любой объект взаимодействует с внешней средой с помощью входов и выходов. Входы - это возможные воздействия на объект, выходы - это те сигналы, которые можно измерить. Существует некоторое правило, по которому элемент преобразует вход  в выход
в выход  :
:
Это правило называется оператором. Запись  означает, что выход y получен в результате применения оператора
означает, что выход y получен в результате применения оператора  к входу . Построить модель - это значит найти оператор, связывающий входы и выходы.
к входу . Построить модель - это значит найти оператор, связывающий входы и выходы.
Оператор, который действует по правилу:  называется оператором интегрирования. Обратный оператор - оператор дифференцирования - вычисляет производную:
называется оператором интегрирования. Обратный оператор - оператор дифференцирования - вычисляет производную:
Обычно оператор дифференцирования обозначается буквой  . Запись
. Запись  внешне выглядит как «умножение» оператора на сигнал t, но на самом деле обозначает действие этого оператора, то есть дифференцирование:
внешне выглядит как «умножение» оператора на сигнал t, но на самом деле обозначает действие этого оператора, то есть дифференцирование: 
Этот оператор играет очень важную роль в описании объектов управления.








