 2020-08-05
2020-08-05 175
175СЛАЙД 24. Линейные дифференциальные уравнения, несмотря на все их многообразие, обладают весьма ограниченным числом следующих основных свойств:
• способность системы к усилению (ослаблению) сигнала;
• способность системы к накоплению (энергии, материи);
• инерционность;
• прогнозируемость;
• колебательность;
• устойчивость;
• запаздывание.
Для расчета различных систем автоматического управления их обычно разбивают на отдельные элементы. Причем различные по своей физической природе элементы могут описываться одинаковыми дифференциальными уравнениями, поэтому их относят к определенным классам, называемым типовыми звеньями.
Изображение системы в виде совокупности типовых звеньев с указанием связей между ними называется структурной схемой. Она может быть получена как на основе дифференциальных уравнений, так и передаточных функций. Данный способ и составляет суть структурного метода, т. е. метода представления систем автоматического управления различной физической природы.
Хотя структурный метод не предлагает новых способов расчета, он позволяет наглядно представить взаимосвязь элементов системы и оценить при наличии соответствующего опыта отдельные свойства переходных и статических процессов. Он настолько широко используется в практике проектирования, что, по существу, может считаться одним из «языков», на котором обсуждаются свойства систем автоматического управления. Итак, классификация следующая:
1 Простейшие или фундаментальные звенья:
пропорциональное;
интегрирующее;
дифференцирующее.
2 Звенья первого порядка:
апериодическое (инерционное);
форсирующее;
другие.
3 Звенья второго порядка:
колебательное;
апериодическое звено второго порядка (частный случай колебательного звена).
4 Звенья третьего порядка:
звено Вышнеградского;
другие звенья.
5 Звено запаздывания - звено, передающее сигнал со входа на выход без искажения его формы, но с некоторой задержкой во времени.
СЛАЙД 25.
| Уравнение | передаточная | переходная | импульсная | |
| Пропорциональное (усилительное) | 

| 
| 
| 
|
| дифференцирующее | 

| 
| 
| 
|
| интегрирующее | 

| 
| 
| 
|
| апериодическое | 

| 
| 
| 
|
| форсирующее | 

| 
| 
| 
|
| Второго порядка | 

| 
| 
| |
| колебательное | 
|
Структурные схемы
СЛАЙД 26. Систему управления можно разбить на блоки, имеющие вход и выход (объект, регулятор, привод, измерительная система). Для того, чтобы показать взаимосвязи этих блоков, используют структурные схемы. На них каждый элемент изображается в виде прямоугольника, внутри которого записывается его передаточная функция. Вход и выход блока показывают соответственно «входящей» и «выходящей» стрелками.
Такая схема наглядно отражает состав системы и связи между отдельными ее составляющими.
При изображении структурной схемы будем придерживаться следующих обозначений ее элементов:
− блок с указанной внутри него динамической характеристикой элемента; входной и выходной сигналы блока обозначаются стрелками; 
сумматор, выход которого равен сумме входных сигналов. Знак каждого сигнала может быть указан возле соответствующего входа (рис.) или внутри сумматора; при этом знак « » относится к перпендикулярно входящему сигналу Для суммирующих элементов используют специальное обозначение - круг, разбитый на сектора. Если сектор залит черным цветом, поступающий в него сигнал вычитается, а не складывается с другими. Разветвление сигнала обозначается точкой, как и радиотехнике.
» относится к перпендикулярно входящему сигналу Для суммирующих элементов используют специальное обозначение - круг, разбитый на сектора. Если сектор залит черным цветом, поступающий в него сигнал вычитается, а не складывается с другими. Разветвление сигнала обозначается точкой, как и радиотехнике. 
− интегратор на структурной схеме будем условно обозначать символом интегрирования или в операторной форме
− 
Переход от исходной передаточной функции или уравнения системы к ее структурной схеме может иметь несколько вариантов решения. Возможен и обратный переход, т. е. на основе структурной схемы можно получить дифференциальное уравнение системы, причем эта задача имеет единственное решение.
При таком представлении внутри блока указываются передаточная функция звена, а также входной и выходной сигналы. С целью упрощения структуры системы применяются различные ее преобразования, приведем основные из них.
Передаточные функции параллельного и последовательного соединений равны соответственно сумме:  и произведению
и произведению  исходных передаточных функций отдельных звеньев:
исходных передаточных функций отдельных звеньев:
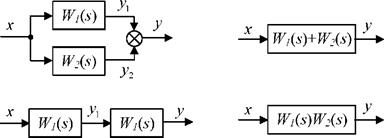
Для двухзвенной системы, в изображениях по Лапласу для параллельного соединения получаем (26)
 , (26)
, (26)
а для последовательного (27)
 . (27)
. (27)
Для контура с отрицательной обратной связью имеем передаточная функция по ошибке
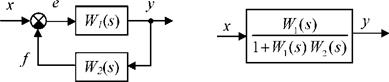 |
 , (28)
, (28)
а изображение по ошибке равно (29):
 (29)
(29)
Поэтому (30)
 (30)
(30)
Перенося  в левую часть, получаем (31)
в левую часть, получаем (31)
 (31)
(31)
СЛАЙД 28. Правило: передаточная функция системы с отрицательной обратной связью равна дроби, в числителе которой стоит передаточная функция прямого канала, а знаменатель представляет собой сумму единицы и произведения передаточных функций прямого и обратного каналов системы. Если обратная связь - положительная (сигналы  и
и  складываются), в знаменателе будет стоять знак «минус»:
складываются), в знаменателе будет стоять знак «минус»:
Передаточная функция замкнутой САУ записывается отдельно для каждой комбинации внешнего воздействия (входа) и выхода x. Разделим каналы прохождения сигналов в системе каждого внешнего воздействия (31): 

 (31)
(31)
Определяют четыре вида передаточных функций:
1. Передаточная функция замкнутой САУ (при  ) (32):
) (32):
 ⇒
⇒
 (32)
(32)
или можно записать через передаточную функцию разомкнутой САУ (33):
 (33)
(33)
 – знаменатель передаточной функции замкнутой системы
– знаменатель передаточной функции замкнутой системы
 – характеристическое уравнение замкнутой системы.
– характеристическое уравнение замкнутой системы.
2) Передаточная функция замкнутой САУ по ошибке (при  ⇒
⇒  ) (34):
) (34): 
 (34)
(34)
или можно записать через передаточную функцию разомкнутой САУ (35):
 . (35)
. (35)
3) Передаточная функция замкнутой САУ по возмущающему воздействию (при  =0⇒
=0⇒  ) (36):
) (36):
Пусть:

 (36)
(36)
или можно представить следующим образом (37)
Из  ⇒
⇒  (37)
(37)
где  .
.
4) Передаточная функция замкнутой системы в целом (38):
 (38)
(38)
Или
 (39)
(39)








