 2020-08-05
2020-08-05 226
226Идентификация-получение математического описания или модели объекта управления. Идентификация динамических объектов состоит в определении их структуры и параметров по наблюдаемым данным-входному воздействию и выходным величинам. Передаточная функция ОУ описывается уравнением апериодического звена первого порядка с запаздыванием. Изображения по Лапласу имеет вид:
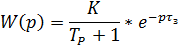
К=13, Т=13, 
Для этого метода мы используем инструментарий System Identification Toolbox. System Identification Toolbox предоставляет возможности для построения математических моделей динамических систем по измеренным данным входа и выхода реальной системы.
Особенности инструментов System Identification Toolbox:
-возможность идентификации передаточных функций, моделей процессов и моделей в пространстве состояний по данным отклика в частотной и временной области;
-моделирование временной последовательности (AR, ARMA, ARIMA) и прогнозирование;
-идентификация линейных и нелинейных систем как черных ящиков для оценки моделей, заданных пользователем;
-оценка задержек, удаление тренда, фильтрация, повторная дискретизация и восстановление недостающих данных;
-блоки для использования идентифицированных моделей в Simulink.
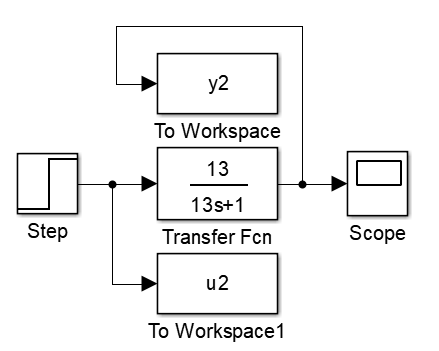
Рис.1.Схема для проведения идентификации.
Модель объекта состоит из:
1. Ступенька (Step)-Step Time=0, Final Value=1;
2. Блок передаточной функции (Transfer Fcn), значения коэффициентов (K, Tp)=13.
Мы заходим в настройки и меняем шаг: Simulation>Model configuration>Parametrs>fixed step>step size T/10.
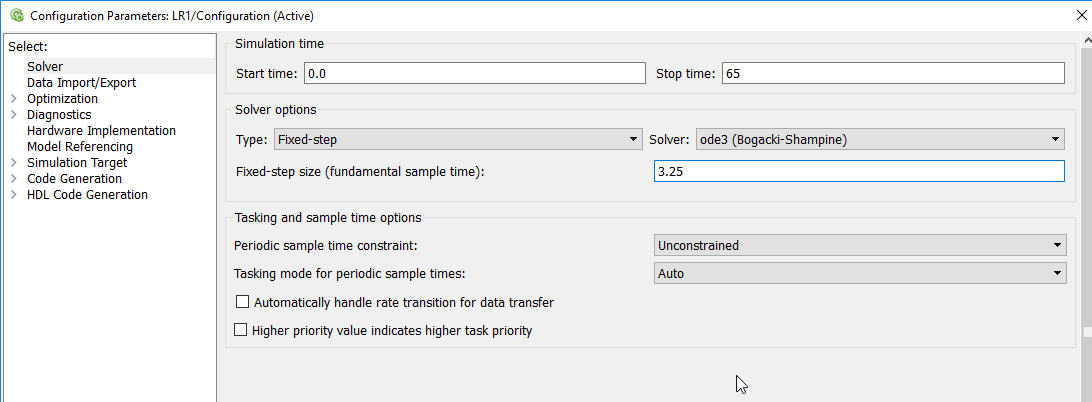
Рис.2. Настройка Configuration Parameters
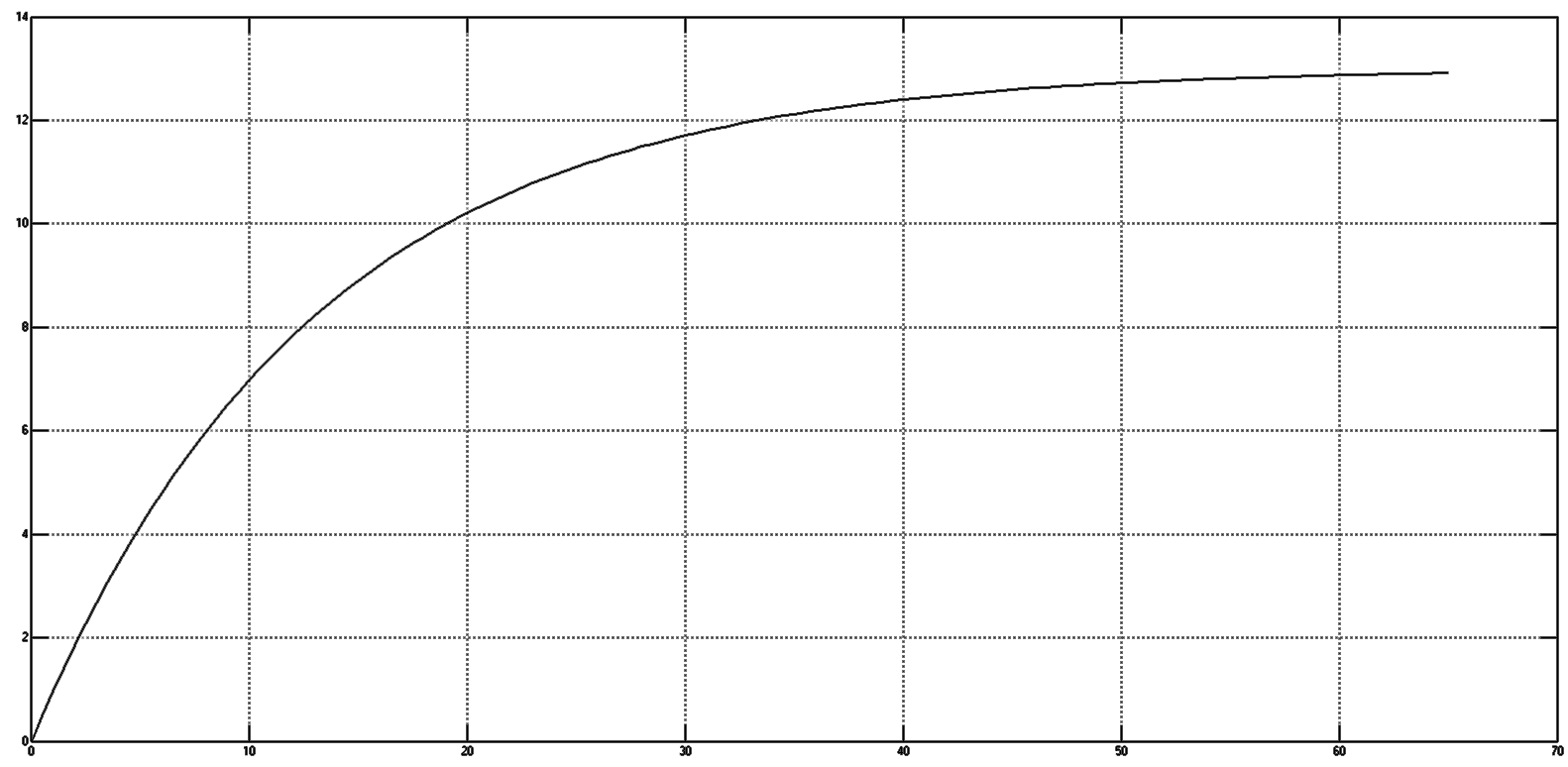
Рис.3. График, полученный из Scope
Используем инструментарий System Identification Toolbox, который предоставит возможность для построения математической модели динамической системы, по измеренным данным входа и выхода реальной системы.
Открываем командную строку (Command Window), вводим «ident». Окно программы, представлено на Рис.4.
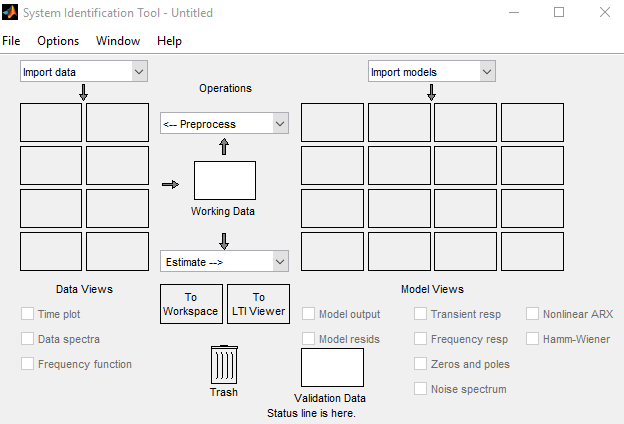
Рис.4.Окно инструментария пакета идентификации.
Далее мы импортируем наш объект, выбираем Time domain data и вводим наши массивы (ввести имена данных): «Input-ul», «Output-y1».
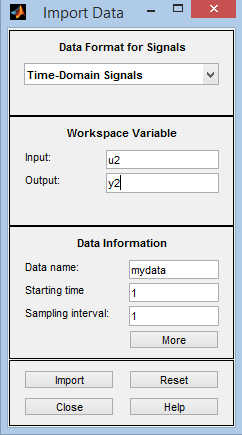
Рис.5. Окно импортирования данных
Задаем значение входа и выхода (Input Output) равные u1 и y1. Нажимаем на «Import». Окно с данными модели, представлено на Рис.6.
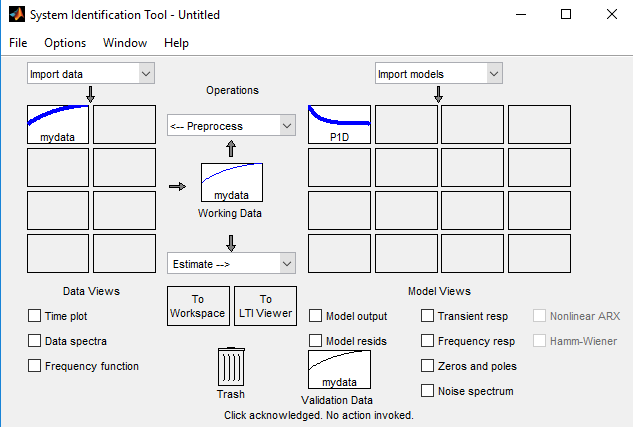
Рис.6. Окно System Identification Toolbox c загруженными данными модели
В меню Estimate выбираем «Process model…». В открывшемся окне Process Models, после нажатия Estimate, мы получаем параметры передаточной функции (K, Tp). Окно Process Models, c полученными параметрами передаточной функции, представлено на Рис.7.
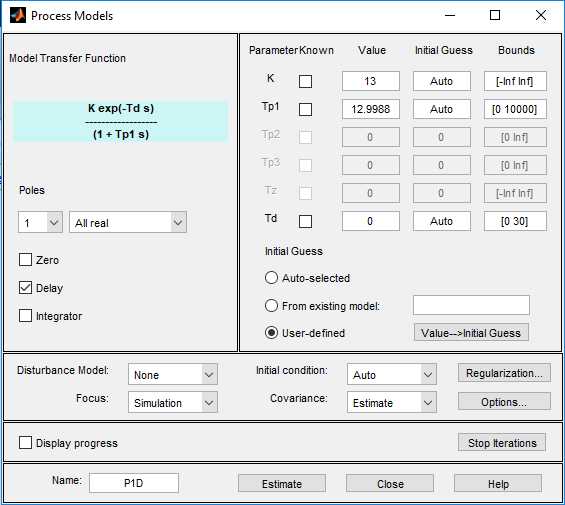
Рис.7. Полученные параметры Т, К и τз
В итоге получаем:
Таблица 2. Коэффициенты переходной функции ОУ
методами идентификации с использованием
System Identification Toolbox.
| K | T | 
|
| 13 | 12.9988 | 6,5 |








