 2020-08-05
2020-08-05 337
337Данный метод основан на критерии Найквист. Суть Критерия заключается в следующем: замкнутая система автоматического регулирования будет устойчива, если устойчива соответствующая ей разомкнутая система и годограф ее АФЧХ не охватывает точку с координатами (-1,0j).
Критерий выполняется, если разомкнутая система находится на границе устойчивости при малой степени астатизма.


Суть метода заключается в том, что рассчитывается пропорциональный регулятор, который выводит систему на границу устойчивости.
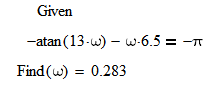
Уравнение для амплитуды и фазы нашего объекта:

Так как нам необходимо перейти на главную ветвь арктангенса изменим уравнение для фазы:

Далее постоим график зависимости фазы от частоты в границах [0;-π] по оси φ и [0;ω] по оси ω.
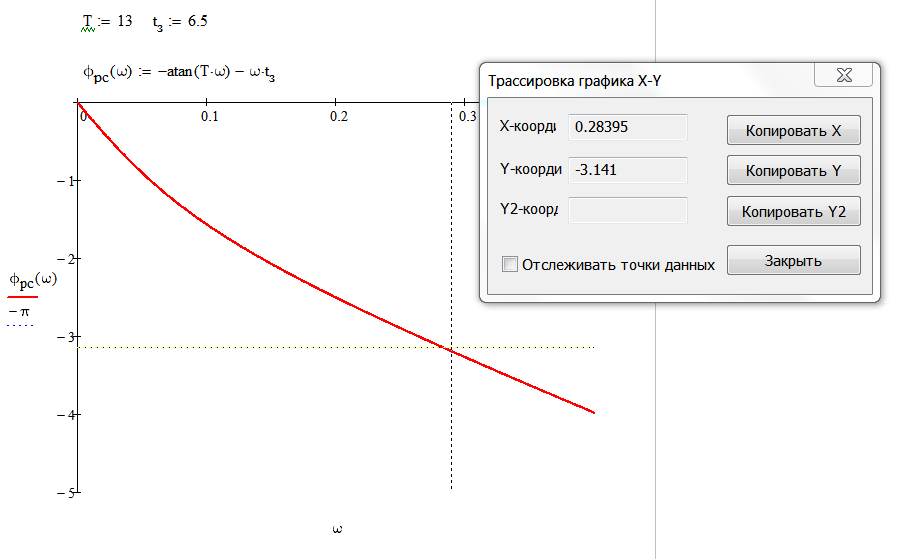
Рис.12. Графическое определение критической частоты.
Далее делаем уточнение корня с помощью функции root:
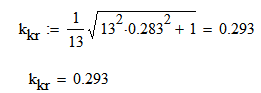
Находим критический коэффициент передачи:
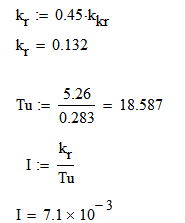
Переходим на эмпирический части метода, а именно к нахождению коэффициента передачи, времени изодрома и интегральной составляющей регулятора по следующим формулам:
Надо так же заметить, что метод применим лишь для объекта в совокупности по числителю и знаменателю передаточной функции третьего и более высокого порядков. В противном случае объект должен обладать запаздыванием.
Исследуем реакцию системы на типовые сигналы по каналам управления и возмущения.
1) Переходная функция по каналу управления.
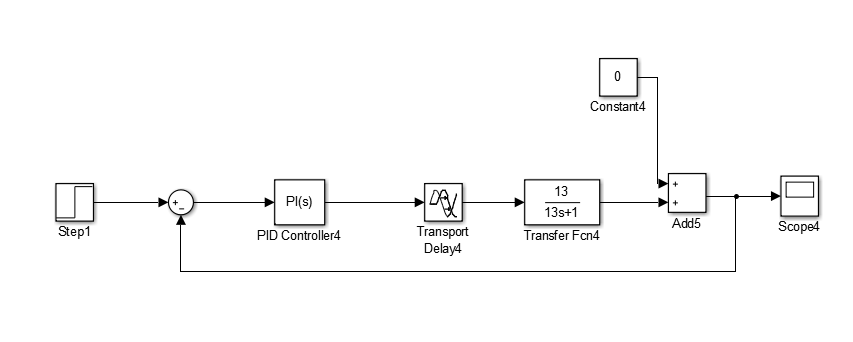
Рис.13.Замкнутая система управления со ступенчатым воздействие по каналу управления.
где:
PID Controller: P= 0,132 I= 7.1*10^-3;
Transport Delay: Time Delay =6,5;
Step: Final Value = 1, Step Time = 0, Initial Value = 0, Sample Time = 0.
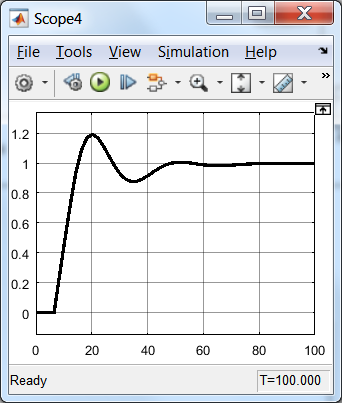
Рис.14.Реакция системы по каналу управления на ступенчатое воздействие.
2) Переходная функция по каналу возмущения.
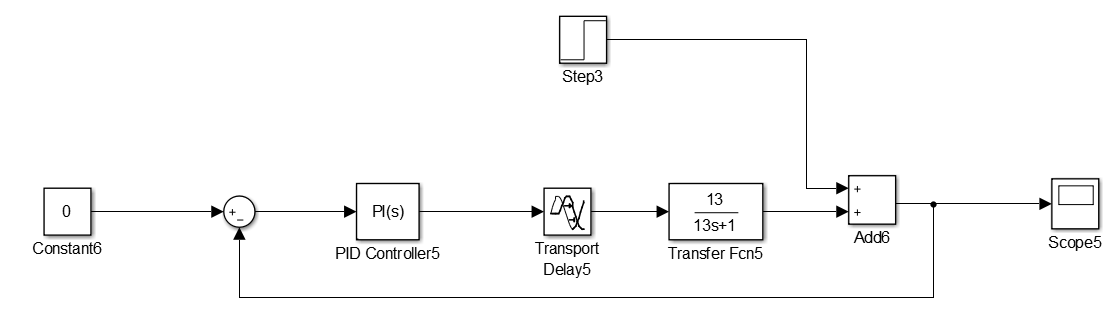
Рис.15.Замкнутая система управления со ступенчатым воздействием по каналу возмущения.
где:
PID Controller: P= 0,132 I= 7.1*10^-3;
Transport Delay: Time Delay =6,5;
Step: Final Value = 1, Step Time = 0, Initial Value = 0, Sample Time = 0.
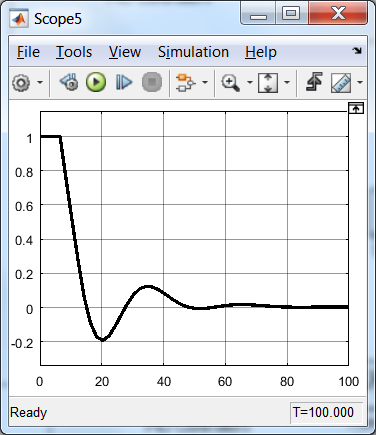
Рис.16.Реакция системы по каналу возмущения на ступенчатое воздействие.
3) Импульсная функция по каналу управления.
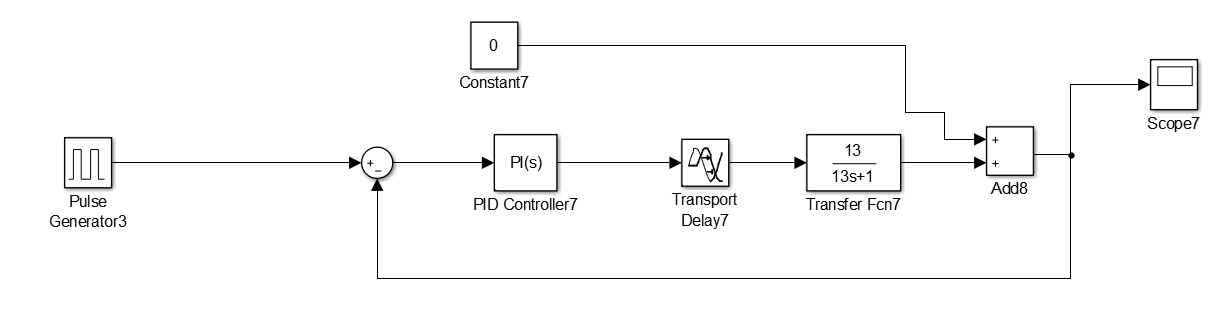 Рис.16.Замкнутая система управления с импульсным воздействием по каналу управления.
Рис.16.Замкнутая система управления с импульсным воздействием по каналу управления.
где:
PID Controller: P= 0,132 I= 7.1*10^-3;
Transport Delay: Time Delay =6,5;
Step: Final Value = 1, Step Time = 0, Initial Value = 0, Sample Time = 0.
Pulse Generator: Amplitude:1;Period:1000;Pulse Width(% of period):0.0001
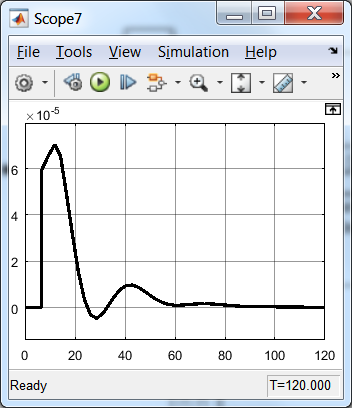
Рис.17.Реакция системы по каналу управления на импульсное воздействие
4) Импульсная функция по каналу возмущения.
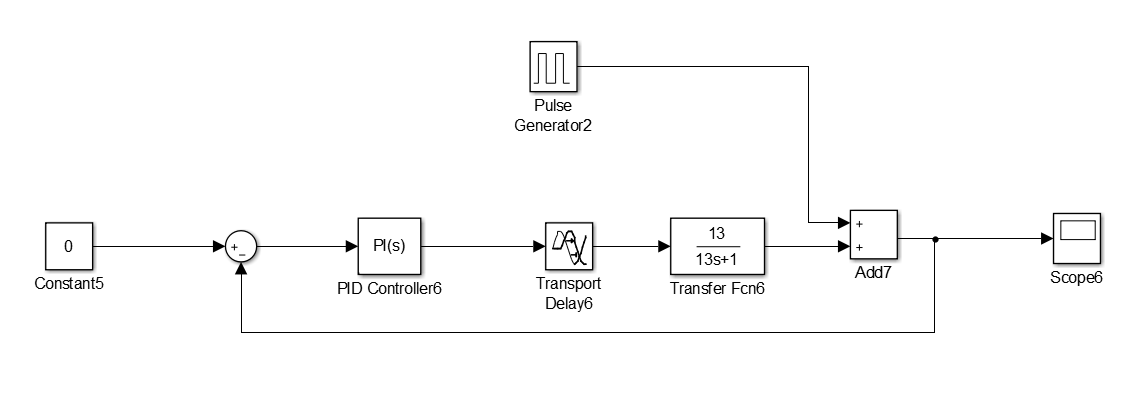
Рис.18.Замкнутая система управления с импульсным воздействием по каналу возмущения.
где:
PID Controller: P= 0,132 I= 7.1*10^-3;
Transport Delay: Time Delay =6,5;
Pulse Generator: Amplitude:1;Period:1000;Pulse Width(% of period):0.5.
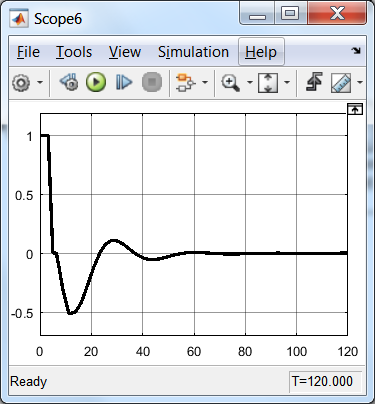
Рис.19.Реакция системы по каналу возмущения на импульсное воздействие.








