 2020-08-05
2020-08-05 100
100Классификация регуляторов
Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п.
По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию для процессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии.
По роду действия регуляторы делятся на непрерывные и дискретные. Дискретные регуляторы, в свою очередь, подразделяются на релейные, цифровые и импульсные.
По виду используемой энергии они подразделяются на электрические (электронные), пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы. В современных системах управления используются цифровые программные регуляторы.
По закону регулирования они делятся на двух- и трех-позиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально-интегральные, и пропорционально-интегрально-дифференциальные регуляторы - сокращенно И, П, ПД, ПИ и ПИД - регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы. Двухпозиционные регуляторы нашли широкое распространение, благодаря своей простоте и малой стоимости.
По назначению регуляторы подразделяются на специализированные (например, регуляторы уровня, давления, температуры и т.д.) и универсальные с нормированными входными и выходными сигналами, пригодные для Управления различными параметрами.
По виду выполняемых функций регуляторы разделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
Автоматический регулятор
Фундаментальные принципы управления
В основе построения САУ есть некоторые общие принципы управления, позволяющие разрабатывать алгоритмы управления в зависимости от фактического функционирования объекта и причин, вызывающих отклонение объекта от заданного.
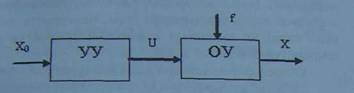
Принцип разомкнутого управления
|
Хо - задание, цель управления или алгоритм функционирования (вход);
f- возмущающее воздействие;
U - управляющее воздействие;
X - выходные координаты.
В данном случае (УУ) не имеет информации о выходе, т.е. о состоянии (ОУ) -цепочка разомкнута. Неиспользуемая информация об объекте - это существенный недостаток, тем не менее этот принцип широко используется: включить, выключить электродвигатель, освещение, совокупность элементов логических И, ИЛИ, НЕ и т.п.
Для водонагревательного котла - это например таблицы зависимости температуры горячей воды в зависимости от расхода пара. По этой таблице, в зависимости от необходимой температуры горячей воды выбирается расход пара.
| Расход пара | Температура горячей воды |
| X1 X2 X3 X4 | Y1 Y2 Y3 Y4 |
Конечно, такой принцип управления для котла использовать нецелесообразно, т.к. возмущение (температура холодной воды, температура пара, неточность заданий расхода пара) не позволяет с высокой точностью управлять температурой горячей воды.
Общей формулой при этом выступает
U=Xo/ko из Xo=X=ko*U.








