 2020-08-05
2020-08-05 211
211Если привод и оператор в состоянии по умолчанию, пользователю будет предложено скопировать предварительно настроенные
параметры двигателя с привода и оператора или начать ручное программирование:
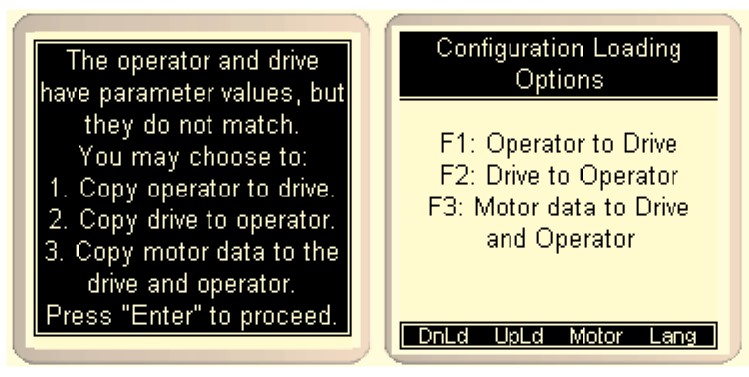 Ранее настроенные пульт оператора и привод. Если один привод или оператор ранее запрограммированы, пользователю будет предоставлена возможность загрузить из оператора в привод, загрузить с привода в панель оператора или скопировать данные двигателя в привод и оператор:
Ранее настроенные пульт оператора и привод. Если один привод или оператор ранее запрограммированы, пользователю будет предоставлена возможность загрузить из оператора в привод, загрузить с привода в панель оператора или скопировать данные двигателя в привод и оператор:
При копировании данных двигателя в привод и оператор, пользователь будет направлен в CH05 Тип Двигателя, чтобы выбрать ту или иную модель двигателя.
12. Руководство по программированию.
В этом разделе содержится краткое руководство по программированию привода KEB Лифт. Обратите внимание, что дополнительные функции или параметры могут быть не перечислены в этом разделе.
 KEB привод LCD лифт можно вручную запрограммировать из меню Домой> Прогр (F3).
KEB привод LCD лифт можно вручную запрограммировать из меню Домой> Прогр (F3).
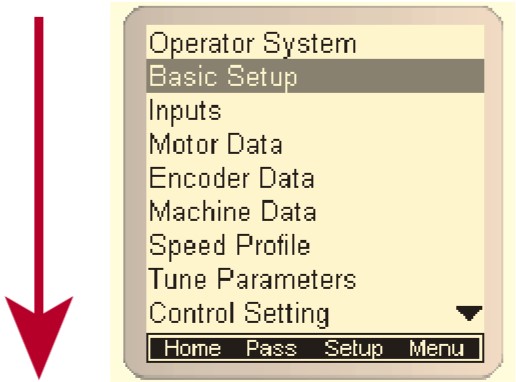
Для того чтобы вручную запрограммировать LCD Оператор, пользователь должен начать с меню- “Базовые Настройки”, заполнив необходимую информацию. Пароль расширенного доступа должен быть установлен для внесения изменений:
Начальное программирование должно начинаться с Базовых Настроек. Вводятся первоначальные настройки до конфигурирования.
Примечание: В большинстве случаев производитель лифта вносит коррективы в Базовые Настройки, это хорошо для проверки правильности установок.
Доступ к Базовым Настройкам: Домой > Прогр (F3) > Базовые Настройки. Все эти параметры должны быть настроены:
• US02 - Система Измерения (Империческая/Метрическая)
• US03 - Тип Двигателя (т.е. Асинхронный или Синхронный)
• US04 - Тип Управления (т.е. Двоичное, по Шине, Аналоговое)
Далее, конфигурация должна быть загружена с помощью US05. Этот шаг служит для загрузки в KEB привод правильных пределов и внутренних настроек в соответствии с применением:
• US05 - Загрузка Конфигурации (Запись конфиг. в привод)
Если успешно, US05 должно измениться с «Не сконфигурировано» на «Конфигурация OK», указывая, что привод и оператор синхронизированы.
Если настройки US04 Тип Управления или US02 Система Измерения изменяются после загрузки конфигурации, то новая конфигурация должна быть записана в привод. Запись новой конфигурации не приведет к сбросу предыдущих настроек.
Если US03 Тип Двигателя должен быть изменен после конфигурирования, новая конфигурация записывается в привод со сбросом по умолчанию всех предыдущих настроек.
Затем введите Ограничение Скорости US06, это установит внутренние пределы безопасности в приводе:
УСТАНОВКА БАЗОВЫХ НАСТРОЕК ЗАВЕРШЕНА!
Далее, входы и выходы должны быть сконфигурированы и назначены функции в зависимости от системы управления.
Настройте входы (Домой> Прогр> Параметры Входов) и назначьте их функции.
• LI01 - Тип Входов (PNP или NPN логика). Для системы Союз- NPN логика.
• LI04-11 - Функция Входа
НАСТРОЙКА ПАРАМЕТРОВ ВХОДОВ ЗАВЕРШЕНА!
Настройте выходы (Домой > Прогр > Выходы) в зависимости от системы управления.
• LO05 - Функция Выхода O1
• LO10 - Функция Выхода O2
• LO15 - Функция Выхода RLY1
• LO20 - Функция Выхода RLY2
НАСТРОЙКА ПАРАМЕТРОВ ВЫХОДОВ ЗАВЕРШЕНА!
Ввод основных параметров двигателя, до проведения автоматической Настройки на Двигатель (Домой > Прогр > Параметры Двигателя).
Инвертор KEB F5 управляет асинхронными и синхронными двигателями с постоянными магнитами. С этого места асинхронные двигатели будут называться “IM”, а с постоянными магнитами будут называться “PM”.
Для асинхронного двигателя введите параметры с заводского шильдика:
• LM01 - Номинальная Мощность
• LM02 - Номинальная Скорость (Асинхронная Скорость)
• LM03 - Номинальный Ток
• LM04 - Номинальная Частота
• LM05 - Номинальное Напряжение
• LM06 - Коэффициент Мощности (cos phi)
Дальнейшие параметры асинхронного двигателя будут определяться в процессе Настройки на Двигатель, описанной ниже.
Для PM двигателей, введите параметры с заводского шильдика:
• LM02 - Номинальная Скорость
• LM03 - Номинальный Ток
• LM04 - Номинальная Частота
• LM05 - Номинальное Напряжение
• LM07 - Номинальный Момент
Для синхронных двигателей важно, что соотношение между скоростью двигателя и номинальной частотой соотносится с числом полюсов. Число полюсов должно всегда быть четным числом. Важно проверить следующие отношения! Смотрите Расчитанное Число
Полюсов в Диагностическом Экране#12 для проверки.
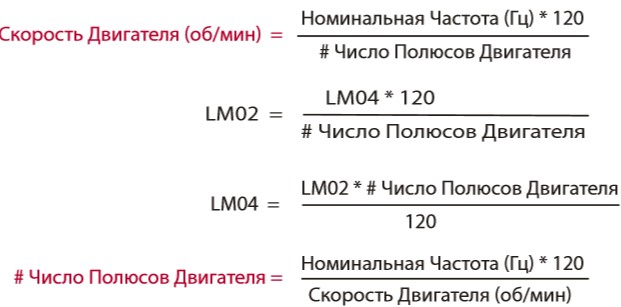
Крутящий момент отображается в зависимости от единицы измерения установленной в US02. Уравнения преобразования эмпирических и метрических единиц, для различной информации с шильдика:

Дальнейшие параметры PM двигателя будут определяться в процессе Настройки на Двигатель, описанной далее.
▼ ВВОД ПАРАМЕТРОВ ДВИГАТЕЛЯ ЗАВЕРШЕН!
Далее, основные параметры энкодера должны быть введены:
• LE02 - Разрешение Энкодера (имп/об)
Для абсолютных энкодеров, может потребоваться дополнительная корректировка параметров.
▼ ВВОД ПАРАМЕТРОВ ЭНКОДЕРА ЗАВЕРШЕН!
Параметры лебедки определяют внутренние расчеты в приводе, которые переводят линейную скорость (например, метр в секунду) в скорость вращения (например, обороты в минуту):
Примечание: Неправильные Параметры Лебедки приведут к слишком быстрой или слишком медленной скорости лифта.
Следующие данные должны быть введены:
• LN01 - Диаметр Канатоведущего Шкива
• LN02 - Передаточное Отношение Редуктора (x:1)
• LN03 - Коэффициент Тросовой Подвески (x:1)
Если диаметр шкива не известен, его можно измерить с помощью рулетки. Некоторые производители шкивов указывают “Минимальный диаметр по канавке”. Это диаметр в нижней части паза, который обычно на 2,5 сантиметра меньше, чем фактический диаметр, в котором лежит канат. Поэтому, когда указывается этот размер, добавьте к нему 2,5 сантиметра и введите это значение в LN01.
Для безредукторной лебедки, передаточное отношение будет 1. Если передаточное отношение у редукторной лебедки неизвестно, LN05 будет рассчитывать это число относительно LM02, US06, LN01 и LN03. Это значение может быть введено как передаточное отношение в LN02.
▼ ВВОД ПАРАМЕТРОВ ЛЕБЕДКИ ЗАВЕРШЕН!
Параметры контроля скорости должны быть установлены для цифрового и двоичного управления, а также позиционирования.
Команды скорости при аналоговом управлении и по цифровой шине формируются контроллером системы управления, поэтому параметры скорости не будут иметь никакого влияния на фактическую скорость, хотя LS02 Номинальная Скорость должна быть введена для Аналогового управления, которая соответствует 10В задания скорости.
Введите параметры скорости, для соответствующего применения:
• LS01 Скорость Дотягивания
• LS02 Номинальная Скорость
• LS03 Скорость Ревизии
• LS04 Коррекционная Скорость
• LS05 Промежуточная Скорость 1
• LS06 Промежуточная Скорость 2
• LS07 Промежуточная Скорость 3
Примечание: Перечень указанных скоростей определяется (по умолчанию) в KEB. Хотя, производитель системы управления может назначить скорости по-своемому (например, производитель системы управления может использовать Промежуточную Скорость 1 как Номинальную Скорость), однако скорость ревизии и коррекции назначены на основе функциональности и / или ограничения скорости.
Если лифт не движется с правильной скоростью, проверьте, какие скорости выбраны и соответствующие настройки, а также соответствие скорости энкодера.
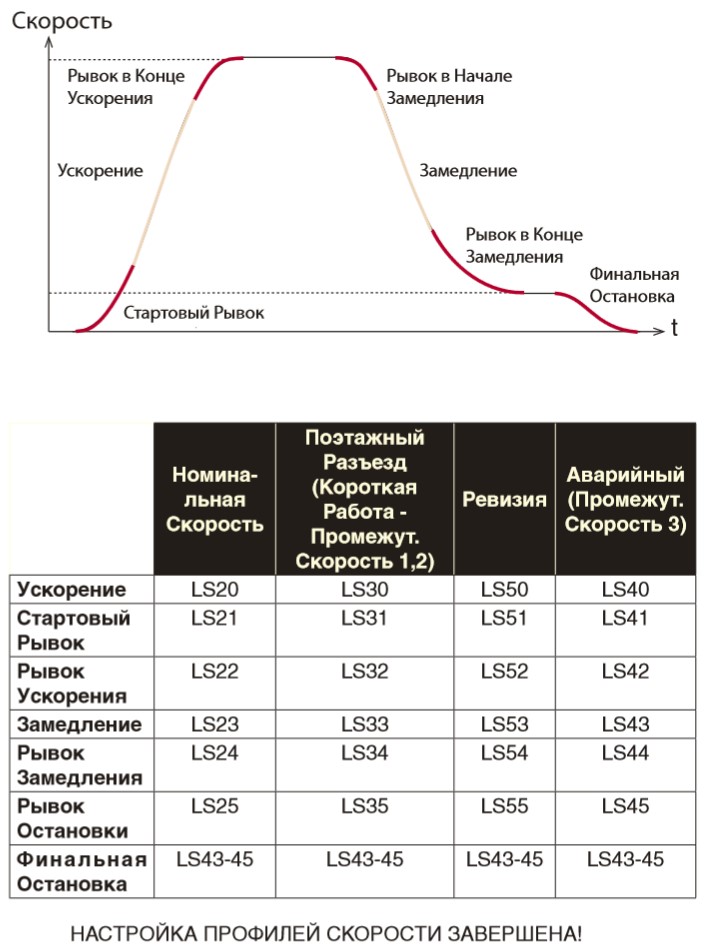
Для цифрового и двоичного управления, а также позиционирования, настройки профиля приведены ниже (для аналогового управления и по цифровой шине эти параметры применяются только для ограничения скорости).
KEB LCD оператор может настроить все параметры профиля в зависимости от необходимого применения. Можно выбрать либо мягкий, средний или жесткий профиль.
Настройки могут быть сделаны с:
• LS15 - Профиль Номинальной Скорости
• LS16 - Профиль Поэтажного Разъезда (Промежут. Скорость 1, 2)
• LS17 - Аварийный Профиль (Промежут. Скорость 3)
Если пользователь хочет настроить профиль, можно настроить различные профили скорости, основанные на выбранной скорости:
13. Ввод в эксплуатацию на основе библиотек параметров лебедок и станций
управления.
Для ускоренного запуска привода лифта необходимо воспользоваться функцией, которая предоставлена в LCD лифт операторе. Необходимые настройки для лебедки и станции управления можно выбрать в библиотеке параметров. Для этого в меню нужно в меню «Программирование» выбрать группу параметров CH “Сохранение/Восстановление”. Далее, выбрать параметр СН03 “Восстановление параметров”, нажав Enter два раза перейти в режим отладки, кнопкой вверх выбрать “Загрузка данных двигателя”, нажать Enter, на экране отобразиться список лебедок и станций управления. Из данного списка необходимо выбрать правильный тип лебедки. Например, лебедка ЕПМ (Европейские Подъемные Машины) LL01001. Далее необходимо произвести процедуру записи параметров в инвертер, нажав F4 для выбранного варианта лебедки, подтвердить начало загрузки в инвертер, нажав Enter.
После того как загрузка параметров лебедки будет успешно осуществлена, произойдет переход на диагностический экран. Далее можно убедиться, что параметры базовых настроек US имеют значения в соответствии с типом выбранной лебедки, параметры US03 (Тип двигателя) “Синхронный безредукторный”, US05 (Загрузка конфигурации) “Конфигурация Ок”.
Параметры двигателя LM имеют номинальные значения в соответствии с данными лебедки.
| SHULM.dw5 | 737 ▲ |
| UKL.dw5 | 738 |
| UEL.dw5 | 735 |
| SHK6000.dw5 ESSAN.dw5 | 737 ▼ |
| Загр |
Далее таким же образом необходимо выполнить загрузку параметров станции управления через библиотеку параметров CH
“Сохранение/Восстановление”/СН03 “Восстановление параметров”/“Загрузка данных двигателя”/УЭЛ.








