 2020-10-12
2020-10-12 175
175Основные понятия
Простейшим типом колебания является гармоническое колебание, когда смещение тела от положения равновесия зависит от времени по закону синуса или косинуса (рис.1а):
х=Asin(wt+j) или х=Acos(wt+j) (1)
где х – величина смещения тела от положения равновесия, А – амплитуда колебания – максимальное смещение от положения равновесия; амплитуда равна максимальному абсолютному значению х в момент t, когда функция sin или cos принимает значение ±1, wt+j- фаза колебания, определяющая положение колеблющегося тела в данный момент.
Основные характеристики колебаний – амплитуда, частота, период. Частота колебаний равна числу полных колебаний, совершаемых за единицу времени. Единицей частоты является Герц (Гц) – частота такого колебания, при котором за 1 с совершается одно полное колебание. Периодом колебаний называется промежуток времени, за который совершается одно полное колебание. Период связан с частотой соотношением Tn=1.
Циклическая или круговая частота колебания численно равна числу полных колебаний, совершаемых за 2p секунд: w=2pn.
Тело совершает гармонические колебания, когда на него действует упругая сила, пропорциональна величине смещения от положения равновесия
F= -kx, (2)
где k – коэффициент упругости. Знак минус указывает, что возвращающаяся сила направлена в сторону, противоположную смещению, то есть к положению равновесия.
 |
Запишем для колеблющегося тела второй закон Ньютона: ma=F или
(3)
 |
Уравнение можно переписать
 |
и ввести обозначение:
(4)
 |
Тогда уравнение примет вид:
(5)
 |
Это и есть дифференциальное уравнение гармонических колебаний. Одним из решений такого уравнения является x=Acos(ωt+φо). Циклическая частота колебаний ωо называется циклической частотой собственных колебаний. Период таких колебаний:
(6)
При гармоническом колебательном движении кинетическая энергия колеблющейся материальной точки непрерывно меняется. Меняется и потенциальная энергия между точкой и окружающими телами.
Кинетическая энергия колеблющейся точки массой m:
 |
Потенциальная энергия квазиупругих сил, отсчитываемая от положения равновесия данной материальной точки:
 |
Где x – смещение колеблющейся точки от положения равновесия, k – коэффициент квазиупругой силы.
 |
Полная энергия материальной точки, совершающей гармоническое колебание с частотой ω и амплитудой A:
В процессе движения происходит непрерывный переход кинетической энергии в потенциальную и обратно, но полная энергия – величина постоянная, она пропорциональна квадрату амплитуды колебаний.
Собственные гармонические колебания системы – это идеальный случай колебаний, когда энергия системой не теряется и амплитуда остаётся постоянной. В случаях реальных колебаний энергия, переданная системе, постепенно расходуется на преодоление сил сопротивления, поэтому амплитуда колебаний уменьшается, колебания затухают. Эти колебания называются затухающими (рис. 1 б, в). Их частота определяется свойствами колеблющейся системы – массой, возвращающейся силой, сопротивлением.
 |
Если сила сопротивления среды пропорциональна скорости колебания, то второй закон Ньютона для колеблющейся точки запишется:
(7)
 |
Введём обозначения 2β=r/m; w²=k/m. Решение уравнения (7) имеет вид:
(8)
 |
Амплитуда затухающих колебаний уменьшается по закону xоe (рис. 1б), частота затухающих колебаний
(9)
Если ωо <β, частота является мнимым числом и имеет место апериодический процесс – рис. 1в.
Рис.1
В случае затухающих колебаний энергия убывает по закону
 |
(10)
 |
Величина отношения энергии за время Т/2π=1/ω характеризует способность колебательной системы сохранять энергию и называется добротностью:
(11)
Добротность равна числу колебаний за время, за которое амплитуда уменьшается в е раз, а энергия в е раз.
 |
Степень затухания колебания характеризуется логарифмическим декрементом, который определяет затухание колебаний за период:
(12)
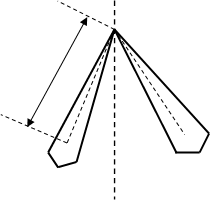
Для изучения колебаний можно использовать физический или математический маятники.
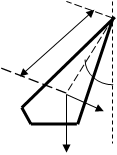
Каждое тело, подвешенное в точке, лежащей выше его центра тяжести, может колебаться и представляет собой физический маятник. На рис. 2 изображен физический маятник, отклонённый от положения равновесия.
 |
O
Через точку О перпендикулярно рисунку проходит неподвижная lc
ось, вокруг которой совершаются колебания, С – центр тяжести
маятника (точка, в которой приложена сила тяжести mg). α
Момент силы mg относительно оси О равен M=-mglс sinα, -
где l – расстояние от оси вращения до центра тяжести – точки С.
При малых углах отклонения, когда можно принять sinα=α, -
основной закон динамики вращательного движения, описывающий mg
 |
колебания такого маятника, можно записать в виде: Рис.2
(13)
где J - момент инерции физического маятника относительно оси вращения.
 |
Это уравнение аналогично дифференциальному уравнению (5); величина mgl/J квадратом круговой частоты гармонических колебаний:
(14)
Решение уравнения (13) α=αоcos(ωot+φ) описывает гармонические колебания, совершаемые физическим маятником. Период таких колебаний:
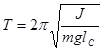 |
(15)
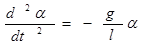 |
Для математического маятника (математическим маятником называют колеблющееся тело размерами которого можно пренебречь по сравнению с расстоянием от центра масс тела до оси вращения) в случае малых углов отклонения дифференциальное уравнение колебаний выглядит:
(16)
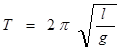 |
Период колебаний математического маятника:
 (17) O
(17) O
Физический маятник, описываемый (13), колеблется с таким же периодом, lo
как и математический маятник, описываемый (16), имеющий длину lо =J/mlc,
где lc - расстояние от О до С.
Приведенной длиной lо физического маятника называется С
длина такого математического маятника, который имеет
тот же период колебаний, что и данный физический маятник. lo' O'
Если к оси физического маятника подвесить грузик на нити О'
такой длины, чтобы она была равна приведенной длине
данного физического маятника (рис.3), то отклоненные на Рис.3
одинаковый угол физический маятник и грузик колеблются вместе, так что грузик всё время находится в одной и той же точке физического маятника – его центре качаний.
Приведенная длина lо всегда больше lс, то есть центр качаний всегда лежит ниже центра тяжести. По теореме Штейна момент инерции относительно оси маятника J=Jo+mlc², где Jо – момент инерции относительно оси, проходящей через центр тяжести. Поэтому приведенная длина будет
 |
Точка подвеса и центр качаний обратимы. Теорема Гюйгенса: если физический маятник подвесить за центр качания, его период не изменится и прежняя точка подвеса будет новым центром качания. Докажем теорему Гюйгенса следующим образом. Расстояние CO' от центра тяжести до новой оси О' lс'=lo-lc, где lo=OO' – прежняя приведенная длина, lc=ОС – расстояние от центра тяжести до прежней оси. Поэтому новая приведенная длина будет равна:
(18)
где J' – момент инерции маятника относительно оси О'.
 |
По теореме Штейна J=Jo+m(lo-lc)², откуда
(19)
 |
где Jo – момент относительно оси, проходящей через центр тяжести. Но, с другой стороны, так как lo=lc+Jo/mlc, подставив lo-lc=Jo/mlc в (19), получим:
(20)
Мы получили, что lo'=lo- обратимость точки подвеса и центра качаний.
Методика эксперимента
Оборотный маятник состоит из стального стержня, на котором закрепляются опоры 1 и 2 в виде призм и грузы 3 и 4.
Рис.4 Рис.5
Метод оборотного маятника основан на сопряженности двух его точек: точки подвеса и центра качаний. Путём изменения расстояний между опорами или между грузами (на данной установке - перемещением груза 3 при неподвижных опорах и грузе 4) добиваются такого расположения грузов на стержне, чтобы период колебаний маятника при его переворачивании не изменился. При выполнении этого условия расстояние между опорами будет являться приведённой длиной маятника lo=L+x'.
 |
Теоретически рассчитать положение центра масс физического маятника можно для упрощенной модели маятника (рис.5), состоящей из невесомого стержня с закрепленными на нем материальными точками 3 и 4. Если расстояние от груза 4 до опоры L, то расстояние от центра масс (точка С) до опор выразится:
(21)
 |
Моменты инерции физического маятника относительно осей, могут быть рассчитаны по формулам:
(22)
Результаты измерений
| № опыта | x,м | t1,с | t2,с |
| 1 | 0.04 | 12.60 | 13.10 |
| 2 | 0.05 | 13.02 | 13.50 |
| 3 | 0.06 | 13.30 | 13.59 |
| 4 | 0.07 | 14.61 | 14.50 |
| 5 | 0.08 | 14.83 | 14.34 |
Расстояние между опорами lo=0.3042 м
L=0,15
Построим графики зависимости t от x и найдем точку пересечения:
х'=0,0625
Найдем То, установив грузы 3 и 4 в положение х'=0,0625 и определим время 12 колебаний 12То маятника:
| № опыта | х', м | 12То, с |
| 1 |
0,0625 | 14,80 |
| 2 | 14,50 | |
| 3 | 14,60 | |
| 4 | 14,30 | |
| 5 | 15,0 |








