 2014-02-02
2014-02-02 1634
1634Классификация электрических машин
Электрические машины делят на две группы: машины постоянного тока и машины переменного тока.
Машины постоянного тока сравнительно редко используют в сельском хозяйстве из-за их высокой стоимости и сложной эксплуатации (наличие скользящих контактов). Тем не менее, с их помощью возможно реализовать глубокое и плавное регулирование угловой скорости. Поэтому они получили широкое применение в устройствах автоматики (электропривод исполнительных механизмов). Их широко используют на мобильных агрегатах в качестве стартерных двигателей, двигателей привода стеклоочистителей и т. п., в грузоподъемных механизмах (башенные краны), сварочных генераторах постоянного тока и т.п.
Машины переменного тока получили более широкое применение. Их в свою очередь также делят на две группы: синхронные машины и асинхронные машины.
Синхронные машины в сельском хозяйстве используют сравнительно редко. Тем не менее, они показывают хорошие свойства в качестве привода мощных насосов, вентиляторов и др. рабочих машин, работающих в продолжительном режиме. Свойство постоянства скорости вращения широко используется в автоматике (электропривод исполнительных механизмов).
При подаче в обмотку возбуждения синхронной машины тока возбуждения больше номинального можно перевести машину в режим генератора реактивной энергии. Поэтому в практике широкое применение нашли синхронные компенсаторы реактивной мощности.
Синхронные трехфазные и однофазные машины используют в качестве трехфазных и однофазных генераторов электрической энергии (дизельные электростанции).
Асинхронные машины – наиболее распространенные машины в сельском хозяйстве. Их число составляет более 95%. Их делят на две группы: машины с фазным ротором и машины с короткозамкнутым ротором.
Машины с фазным ротором редко применяют в сельском хозяйстве из-за их более высокой стоимости, наличия скользящих контактов. Их применяю в тех случаях, когда требуется обеспечить значительные пусковые моменты двигателей при ограниченных пусковых токах. Кроме этого, они позволяют осуществлять более глубоко и плавное регулирование скорости по сравнению с асинхронными. В практике их применяют в качестве электроприводов грузоподъемных устройств (козловые краны) и др. машин, где требуются значительные пусковые моменты.
Асинхронные машины с короткозамкнутым ротором наиболее просты, дешевы, не имеют скользящих контактов, поэтому получили самое широкое применение. Однако до недавних пор их недостатком считали ограниченность регулирования скорости. В последние годы развитие технологий позволило реализовать частотное регулирование скорости машин, что позволило им выгодно конкурировать с машинами постоянного тока.
Для двигателя постоянного тока с независимым возбуждением (ДПТ НВ) (рис. 55, а) уравнение электрического равновесия цепи якоря на основании второго закона Кирхгофа имеет вид
 (1)
(1)
где U — напряжение питания; rЯ — сопротивление обмотки якоря; RЯ — сопротивление реостата в цепи якоря; IЯ - ток обмотки якоря.
При вращении обмотки якоря ДПТ в магнитном поле полюсов в ней в соответствии с законом электромагнитной индукции наводится ЭДС
Е=сФ ω (2)
где с — конструктивная постоянная машины; Ф — магнитный поток полюсов; ω — угловая скорость вращения якоря.
Вращающий моментДПТ равен
М=сФIЯ. (3)
Подставляя (2) и (3) в (1) и решая полученное выражение относительно угловой скорости, получим уравнение механической характеристики ω= f (M) ДПТ НВ
 (4)
(4)
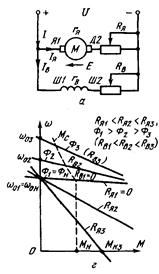
Рис. 55. Схема включения а и механические характеристики г двигателя постоянного тока с независимым возбуждением
При отсутствии нагрузки на валу двигателя (М= 0) якорь в соответствии с (4) имеет наибольшую угловую скорость вращения ω0, которую называют скоростью идеального холостого хода

Из анализа уравнения (4) следует, что механическая характеристика ДПТ НВ линейна, график (рис. 55, г) начинается в точке ω0 (при М = 0) и при увеличении момента М убывает угловая скорость вращения ω якоря.
Поведение механической характеристики определяется параметрами RЯ, Ф и U (рис. 55, г).
При U=UH, Ф=ФН и RЯ =0 механическую характеристику называют естественной. При других параметрах U, Ф и RЯ характеристики называют искусственными.
Наименьший наклон имеет естественная механическая характеристика. Включение реостата RЯ в цепь якоря ведет к увеличению угла наклона механической характеристики электродвигателя, и тем значительнее, чем больше значение сопротивления RЯ.
Перегрузочная способность двигателя достаточно высока и определяется соотношением

где Mmax – максимально допустимый момент двигателя.
Двигатели допускают кратковременную перегрузку в 2,0 – 2,5 раза. Перегрузки более 2,5 раз ограничены условиями коммутации на коллекторе (сопровождающейся сильным искрением).

