 2014-02-02
2014-02-02 4758
4758Некоторые определения
Лекция 14. Робастые системы
Системы, обеспечивающие приемлемую работу при измене- нении статистических характеристик входных воздействий в широких пределах, получили название робастых (robust), что в переводе означает «крепкий, сильный».
Для построения робастых систем требуется минимум априорных сведений о входных воздействиях. Обычно эти сведения ограничиваются установлением максимальных или среднеквадратичных значений самих воздействий и их первых производных (скоростей, ускорений и т.д.). Робастые системы используют в качестве устройств управления ЭВМ.
Микропроцессор — программно управляемое устройство, непосредственно осуществляющее процесс обработки цифровой информации и управление им, построенное на одной или нескольких БИС.
Унифицированная большая интегральная схема (БИС) — которая может быть применена при построении различных средств обработки информации.
Мини Э В М - малая вычислительная машина, имеющая широкое применение благодаря малым габаритам, низкой стоимости, относительно высокой производительности. Длина слова в мини-ЭВМ также мала и составляет от 8 до 18 разрядов, в большинстве случаев — 16 разрядов.
МикроЭВМ — ЭВМ, состоящая из микропроцессора, полупроводниковой памяти, средств связи с периферийными устройствами и, при необходимости, пульта управления и источника питания, объединенных общей несущей конструкцией.
Управляющая микроЭВМ — микроЭВМ, которая использует данные (информацию) о процессе, вырабатывает выходные сигналы, управляющие работой объектов, участвующих в этом процессе.
Встраиваемая управляющая микроЭВМ — микроЭВМ, лишенная индивидуальных органов управления, конструктивно введенная в состав аппаратуры управляемого объекта.
Специализированная микроЭВМ — микроЭВМ, предназначенная для решения определенного класса задач.
У ни в е рсальная микроЭВМ — микроЭВМ, предназначенная, для решения широкого класса задач.
Виртуальная ЭВМ — функциональный эквивалент вычислительной машины, внешних устройств и программного обеспечения, эмулируемый на конкретной вычислительной системе.
При создании систем автоматического управления принципиально возможно идти по двум направлениям.

Рис. 14. 1. Структурная схема системы управления с центральной управляющей микроЭВМ
Первое из них связано с использованием центральных управляющих микроЭВМ. Подобные системы могут применяться для управления сложными объектами (самолетами, ракетами, прокатными станами, доменными печами и т.п.) или группами объектов при комплексной автоматизации в различных отраслях промышленности и сельского хозяйства (металлургической, химической, нефтеперерабатывающей, в тепличном овощеводстве, животноводстве и т.д.).
Общая структурная схема автоматической системы с микроЭВМ для этого случая показана на рис.14.1. Система содержит ряд входных ВхП1, ВхП2,..., ВхПк и выходных ВыхП1, ВыхП2,..., ВыхПк преобразователей, обменивающихся сигналами управления с микроЭВМ в процессе преобразования данных по шине управления. Сигналы с выходных преобразователей поступают на исполнительные устройства, воздействующие на объект (или объекты) управления.
Такая система может быть связанной многомерной, если осуществляется управление сложным, многомерным объектом, и несвязанной многомерной, если осуществляется управление группой несвязанных одномерных объектов. В последнем случае САУ с микроЭВМ распадается на совокупность одномерных, систем; ее виртуальная (кажущаяся) структура представляется в виде совокупности одноконтурных систем автоматического управления (рис.14.2), каждая из которых имеет свою программу управления ПУ1, ПУ2…ПУк.
При управлении сложным объектом или группой объектов процессор обслуживает по очереди отдельные каналы управления.
Эта очередь может осуществляться по жесткой программе или по мере поступления заявок от отдельных каналов с возможностью использования в последнем случае приоритетного обслуживания.
Второе направление, по которому развиваются в настоящее время САУ с микроЭВМ, — это использование в каждом контуре управления автономной микроЭВМ, называемой часто микроконтроллером. Структурная схема САУ с автономными микроЭВМ MKl, МК2….МKк показана на рис.14.3
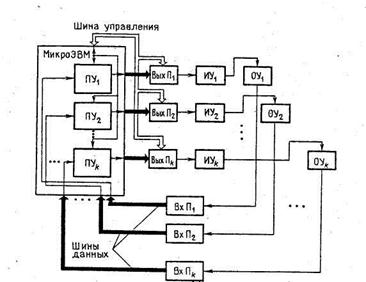
Рис. 14.2. Виртуальная структура САУ с центральной микроЭВМ
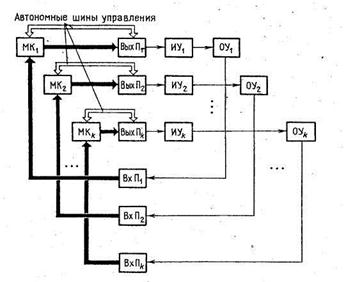
Рис. 14.3. Схема системы с автономными управляющими микроЭВМ
Микроконтроллеры представляют собой упрощенные варианты микроЭВМ, размещаемых в непосредственной близости от управляемого объекта. В микроконтроллерных системах центральная ЭВМ либо отсутствует совсем, либо вводится для передачи ей функций диспетчера или супервизора.
Выбор одного из двух направлений построения САУ с микроЭВМ связан, в частности, с проблемами надежности и стоимости. Стоимость систем, использующих центральную управляющую микроЭВМ, обычно при большом числе управляемых объектов ниже стоимости микроконтроллерных систем. Эта закономерность, впрочем, с развитием технологии производства микропроцессоров, приведшей к созданию высокоэффективных однокристальных микроЭВМ, проявляется все в меньшей степени. Кроме того, системы на базе центральных управляющих микроЭВМ являются технологически менее надежными. Они нуждаются в дорогостоящих, помехоустойчивых линиях связи. Поэтому принцип децентрализованного (микроконтроллерного) управления в микропроцессорных системах постепенно становится превалирующим.
Дляувеличения надежности, производительности и гибкости микроЭВМ в системах автоматического управления применяют многопроцессорные системы и системы на базе многих микроЭВМ — многомашинные системы.
Первый класс структур цифровых САУ характеризуется тем, что большое число микропроцессоров работает на одну общую шину (рис.14.4). Организация параллельной работы нескольких микропроцессоров позволяет реализовать один из следующих режимов: 1) одновременное выполнение нескольких команд программы; 2) одновременное выполнение нескольких программ или подпрограмм. В первом режиме каждый процессор выполняет команды определенного класса, например, логические команды, арифметические команды, команды по определению адресов и др. Во втором режиме каждый процессор имеет возможность работать с полным списком команд. Оба режима позволяют увеличить производительность управляющих микроЭВМ.
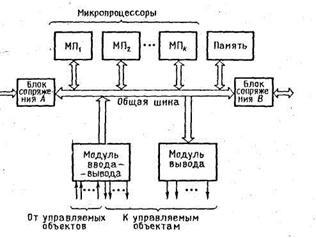 |
Рис.14.4. Блок-схема многомикропроцессорной системы
Топология второго класса структур цифровых САУ определяется требованиями надежности, стоимости, гибкости и производительности. Возможные варианты топологии многомашинных систем (соответственно иерархическая, шинная, сетевая, кольцевая, матричная двух типов, последовательная) изображены на рис.14.5, где прямоугольниками схематически показаны микроЭВМ, а кружками — объекты управления.
Структуры данного класса обладают высокой надежностью. Например, при выходе из строя любой микроЭВМ в системе с сетевой топологией, показанной на рис.14.5 в, сохраняются, по меньшей мере, два канала связи со всеми другими микроЭВМ.
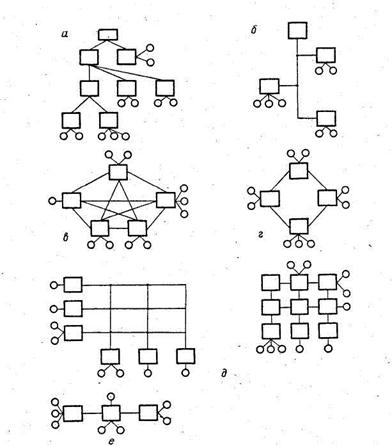 |
Рис.14.5. Топология цифровых САУ
14.3. Типовая структура одноконтурной САУ c ЭВМ в контуре управления
Такая структура содержит аналого-цифровые преобразователи АЦП1 и АЦП2, цифро-аналоговый преобразователь ЦАП, мироЭВМ и непрерывную часть системы (рис.14.6) 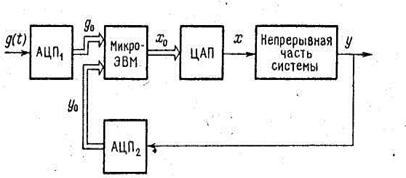
Рис.14.6. Типовая структура одноконтурной САУ с ЭВМ в контуре управления
Кодироваться в АЦП может входное задающее воздействие g (t), представляющее собой желаемое значение управляемой величины у (t), управляемая величина, а также другая поступающая извне информация. В результате такого кодирования на вход микроЭВМ в дискретные моменты времени поступают цифровые представления этих величин g0 и yо.

