 2014-02-02
2014-02-02 531
531Технические системы для управления двигателями постоянного тока
Известные способы управления – якорное и полюсное реализируются в следующих технических системах:
1) Система «Генератор-двигатель»(Г-Д). В этом случае при неизменных оборотах стороннего двигателя, вращающего вал генератора, за счет изменения потока возбуждения генератора, меняется ЭДС и, следовательно, напряжение питания двигателя  . Такой способ управления экономически оправдан при групповом управлении двигателей от одного генератора (двигатели гребных винтов судов, прокатных станов и т.п.)
. Такой способ управления экономически оправдан при групповом управлении двигателей от одного генератора (двигатели гребных винтов судов, прокатных станов и т.п.)

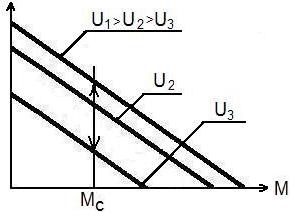
Рис.2.14. Семейство механических характеристик двигателя
При постоянной нагрузке MС угловая скорость ω двигателя линейно зависит от напряжения на якоре (рис. 2.14).
2) Система «Управляемый выпрямитель-двигатель»(УВ-Д).
3) Система «Широтно - импульсный преобразователь - двигатель»
(ШИП-Д).
В системах 2 и 3 меняется среднее значение напряжения на выходе преобразователя, к которому подключен якорь двигателя.
4) Система «Магнитный усилитель-двигатель»(МУ-Д).
Рассмотрим кратко систему УВ-Д при однофазном питании управляемого выпрямителя (рис.2.15), где сокращенно обозначены:
Рис.2.15. Структурная схема системы УВ-Д
УВ – мостовой управляемый выпрямитель.
СИФУ – система импульсно-фазового управления УВ.
При питании двигателя от трёхфазной сети с помощью двухполупериодного управляемого выпрямителя сглаживающий фильтр не нужен.
Принципиальная схема силовой части УВ - Д показана на рис.2.16,где использованы следующие обозначения.
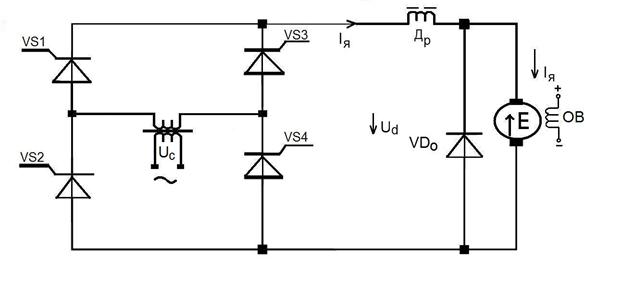
Рис.2.16
 р – дроссель,
р – дроссель,  – вентиль нулевого тока, через который протекает
– вентиль нулевого тока, через который протекает  после того, как выпрямленное напряжение Ud станет меньше противоэдс двигателя E=CenФ. Когда Ud
после того, как выпрямленное напряжение Ud станет меньше противоэдс двигателя E=CenФ. Когда Ud  открытая пара тиристоров (VS1, VS4 или VS2, VS3) закрывается. На рис. 2.17 показаны осциллограммы ряда величин, характеризующие работу системы УВ-Д. Заштрихованные участки соответствуют временным интервалам протекания тока через тиристоры УВ.
открытая пара тиристоров (VS1, VS4 или VS2, VS3) закрывается. На рис. 2.17 показаны осциллограммы ряда величин, характеризующие работу системы УВ-Д. Заштрихованные участки соответствуют временным интервалам протекания тока через тиристоры УВ.
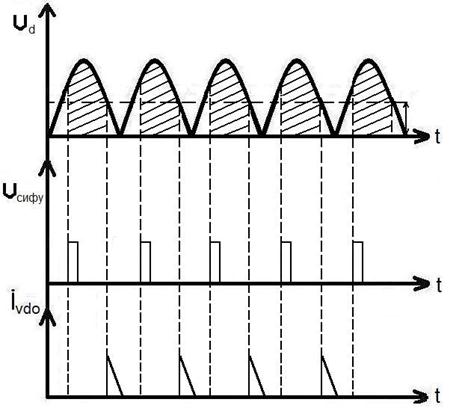

Рис. 2.17
Синхроимпульсы СИФУ формируются в моменты перехода  через 0, сдвигаются на заданную фазу и управляют моментом включения силовых тиристоров VS1- VS4 мостовой схемы. Тем самым изменяется среднее значение напряжения Ud на выходе моста. Дроссель р уменьшает пульсацию тока якоря, а вентиль нулевого тока обеспечивает замыкание тока якоря на интервале времени, когда противоэдс Е превышает мгновенные значения напряжения Ud (в эти интервалы времени все тиристоры моста заперты, а ток из-за индуктивности обмотки якоря скачком оборваться не может).
через 0, сдвигаются на заданную фазу и управляют моментом включения силовых тиристоров VS1- VS4 мостовой схемы. Тем самым изменяется среднее значение напряжения Ud на выходе моста. Дроссель р уменьшает пульсацию тока якоря, а вентиль нулевого тока обеспечивает замыкание тока якоря на интервале времени, когда противоэдс Е превышает мгновенные значения напряжения Ud (в эти интервалы времени все тиристоры моста заперты, а ток из-за индуктивности обмотки якоря скачком оборваться не может).
Упрощенная принципиальная схема силовой части системы ШИП-Д показана на рис.2.18.
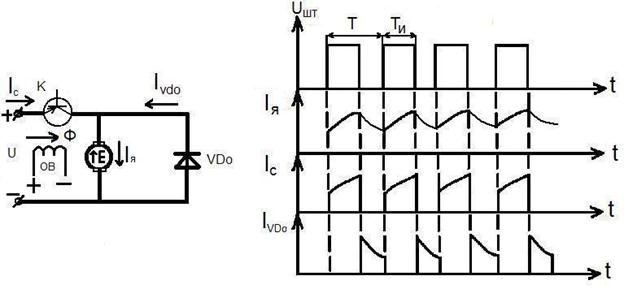
Рис.2.18 Рис.2.19
По первому закону Кирхгофа .
.
 - частота коммутации транзисторного ключа К.
- частота коммутации транзисторного ключа К.
Осциллограммы установившегося режима работы силовой части системы ШИП-Д показаны на рис. 2.19. Уравнение механической характеристики двигателя в системе ШИП-Д
 ,
,
где Kэм - электромагнитный коэффициент, определяемый по данным технического паспорта,  – коэффициент продолжительности включения,
– коэффициент продолжительности включения,  . При выборе
. При выборе  необходимо учитывать, что граничная величина среднего значения тока якоря, при которой наступает «неприятный» для двигателя режим прерывистого тока якоря, связана с пусковым током
необходимо учитывать, что граничная величина среднего значения тока якоря, при которой наступает «неприятный» для двигателя режим прерывистого тока якоря, связана с пусковым током  формулой
формулой
 ,
,
где  - пусковой ток.
- пусковой ток.
При  механические характеристики двигателя постоянного тока независимого и параллельного возбуждения становятся нелинейными, что неблагоприятно сказывается на точности управления. Поэтому необходимо минимизировать величину
механические характеристики двигателя постоянного тока независимого и параллельного возбуждения становятся нелинейными, что неблагоприятно сказывается на точности управления. Поэтому необходимо минимизировать величину  . Если принять коэффициент
. Если принять коэффициент  равным 0.5, то выражение для принимает вид
равным 0.5, то выражение для принимает вид  .
.
Увеличивать  для минимизации путём включения дросселя в цепь якоря нецелесообразно, т.к. это снижает быстродействие системы с двигателем. Наиболее целесообразно увеличивать частоту коммутации ШИП до 15-20 кГц.
для минимизации путём включения дросселя в цепь якоря нецелесообразно, т.к. это снижает быстродействие системы с двигателем. Наиболее целесообразно увеличивать частоту коммутации ШИП до 15-20 кГц.








