 2014-02-02
2014-02-02 2743
2743
 (5.54)
(5.54)
Оценки (5.54) являются более полными оценками качества, однако их применение связано с громоздкими преобразованиями и вычислениями. Поэтому на практике обычно ограничивается применением простейшей квадратичной интегральной оценки. Любая интегральная оценка зависит от коэффициентов передаточной функции (коэффициентов характеристического уравнения).
Вычисление линейной оценки вида I0 можно выполнить следующим образом.
Пусть имеется дифференциальное уравнение
 (5.55)
(5.55)
с произвольными начальными условиями  .
.
Интегрируя уравнение (5.55), имеем:
 . (5.56)
. (5.56)
В устойчивой САУ в установившемся режиме, т.е. при t→ ∞, производные всех порядков равны нулю, следовательно, из (5.66) можем записать:
 . (5.57)
. (5.57)
Из (5.57) видно, что линейная интегральная оценка I0 определяется коэффициентами дифференциального уравнения системы и начальными условиями.
При проектировании системы по минимуму интеграла I1 система может оказаться обладающей слишком большой колебательностью. В силу этого вводится дополнительная оценка  . Считается допустимым для систем второго порядка l = 0,8¸0,9, для систем третьего порядка l = 0,7¸0,8, для систем четвертого порядка l = 0,6¸0,7.
. Считается допустимым для систем второго порядка l = 0,8¸0,9, для систем третьего порядка l = 0,7¸0,8, для систем четвертого порядка l = 0,6¸0,7.
Определение косвенных показателей качества по интегралу вида I2 дает удовлетворительные результаты для систем, склонных к повышенной колебательности.
Интегральные оценки можно использовать при выборе оптимального значения какого-либо параметра системы, обеспечивающего минимум такой оценки.
5.8. КОСВЕННЫЕ ОЦЕНКИ КАЧЕСТВА, СВЯЗАННЫЕ С ВИДОМ
ЧАСТОТНЫХ ХАРАКТЕРИСТИК
5.8.1. Анализ качества по АЧХ замкнутой системы
При анализе качества переходного процесса можно воспользоваться амплитудно-частотными характеристиками (АЧХ) замкнутой системы. Если система неустойчива, то амплитуда колебаний на выходе системы достигает бесконечно большой величины. В этом случае АЧХ замкнутей системы М(w) терпит разрыв (рис. 5.10 а).
АЧХ устойчивой САУ либо имеет пик, либо является убывающей функцией частоты в зависимости от соотношения параметров (кривые 1- 4, рис. 5.10 а).
Уменьшение пика характеризует снижение амплитуды и числа колебаний, совершаемых системой в переходном режиме (рис.5.10,б). Если характеристика М(w) имеет несколько пиков, то наибольшее влияние не переходный процесс оказывает первый пик при низкой частоте. С уменьшением максимума М(w) процесс затухает быстрее. При невозрастающей характеристике (кривая 4) переходный процесс является монотонным (без перерегулирования).
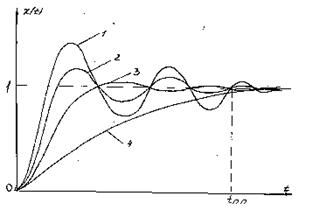
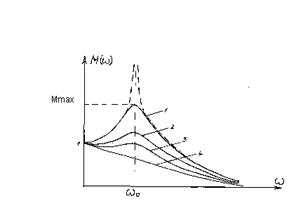
Рис. 5.10
Следовательно, пик характеристики М(w) может служить косвенной оценкой величины перерегулирования и колебательности процесса. При этом отношение максимума характеристики М(w) к значению амплитуды при w = 0 называется показателем колебательности М. Для обеспечения малой колебательности и большого быстродействия системы желательно выбрать ее структуру и параметры так, что бы амплитудная характеристика М(w) имела малый пик и широкую полосу пропускания частот. Однако наличие в системе помех, частота которых обычно велика, делает нецелесообразным стремление к чрезмерному расширению полосы пропускания частот. По техническим требованиям величина М должна выбираться в пределах 1,2 ¸ 1,5, а w находиться по заданному tпп например,
 ,
,
где n –число колебаний (обычно n = 1¸2).
5.8.2. Оценка качества САУ по логарифмическим частотным
характеристикам разомкнутой системы
Для исключения колебательности при единичном входном воздействии необходимо, чтобы частота среза w ср соответствовала участку ЛАХ с наклоном (-20) дБ/дек.
Чем шире участок ЛАХ с наклоном (- 20) дБ/дек, пересекающий ось абсцисс, тем ближе переходная характеристика к экспоненте. В общем случае время подходного процесса определяется неравенством
 . (5.58)
. (5.58)
Как показали исследования, вид участка ЛАХ при низких частотах мало влияет на характер переходного процесса. Следовательно, при оценке переходного процесса по ЛАХ разомкнутой системы низкочастотный участок можно не учитывать (низкочастотный участок ЛАХ характеризует ошибки САУ). Аналогичный вывод можно получить относительно высокочастотного участка ЛАХ. Для астатических систем с астатизмом 1-го порядка добротность равна коэффициенту усиления, поэтому точка пересечения начальной линии ЛАХ с осью ординат при w = 1, определяет добротность следящей системы.
Запасы устойчивости также определяют качество САУ. Чем меньше запасы устойчивости, тем ближе система к границе устойчивости, тем больше колебательность. Увеличение запасов устойчивости приводит к уменьшению колеба-тельности, однако, неограниченное увеличение запасов устойчивости может привести к недопустимо большим статическим ошибкам регулирования, система становится "вялой", неуправляемой.
5.8.3 Приближенная оценка вида переходного процесса
по вещественной частотной характеристике
Известно, что переходный процесс выражается через действительную частотную характеристику замкнутой системы и при помощи интеграла
 . (5.59)
. (5.59)
Анализ выражения (5.59) позволяет высказать некоторые предварительные соображения о характере и особенностях переходного процесса x(t) по виду действительной характеристики U(w) без построения самого процесса.
Интервал частот, ограниченный частотой w0, назовем полосой пропускания системы автоматического управления. На частоты, лежащие за пределами полосы пропускания, система практически не реагирует
1. Значение вещественной характеристики при w=0 равно значению координаты в конце переходного процесса, т.е. U0=x(¥)=xуст.
2.. Для того, чтобы в статической системе величина перерегулирования s(%) не превосходила 18%, достаточно, чтобы вещественная характеристика представляла собой невозрастающую функцию частоты.
3. Для того, чтобы переходный процесс протекал монотонно, достаточно, чтобы вещественная характеристика была положительной функцией w с отрицательной и убывающей по абсолютной величине производной.
4. Процесс заведомо немонотонный и имеется перерегулирование, если выполняется условие
 при всех w.
при всех w.
5. Если выполнено условие монотонности (признак 3), то время регулирования tпп, т.е. время достижения координатой x значения 95% x(¥), будет заведомо больше 4p/wП, т.е. tпп >4p/wП.
Из этого признака следует, что чем круче проходит кривая U(w), тем больше время регулирования tпп. В общем случае время регулирования tпп заведомо больше p/wп.
6. Чем более полого протекает вещественная характеристика, тем быстрее заканчивается переходный процесс.
7. Если вещественная характеристика имеет высокий и острый пик на частоте ω0, то переходный процесс содержит медленно затухающие колебания с частотой ω0.
6. ДИНАМИЧЕСКИЙ СИНТЕЗ САУ
Лекция 17
План лекции:
1. Определение и общие понятия синтеза САУ.
2. Этапы синтеза.
3. Требования к динамическим свойствам САУ.
4. Методы коррекции динамических свойств САУ.
5. Рекомендуемая литература [1, 2, 4, 6 ].
6.1. ОБЩИЕ ПОНЯТИЯ СИНТЕЗА САУ
Теория автоматического управления призвана решать задачи двух типов: задачи анализа САУ, которые сводятся к исследованию динамики систем, и задачи синтеза САУ, которые можно свести к выбору схемы взаимодействия регулируемого объекта с автоматическими регуляторами и автоматических регуляторов между собой, к определению схем автоматических регуляторов, выбору и расчету элементов и параметров автоматических регуляторов.
Решение задачи синтеза не является однозначным, так как одни и те же требования, предъявляемые к САУ, можно удовлетворить различными путями. Эти требования иногда противоречат друг другу, поэтому при выборе структуры и параметров проектируемой системы возникает необходимость компромиссного решения задачи, что усложняет синтез.
В силу указанных причин задача синтеза систем автоматики часто ставится ограниченно, что облегчает ее решение.
Обычно определенная часть проектируемой системы задана. Требуется выбрать общую структурную схему и значения параметров дополнительной части системы. Естественно, что дополнительная изменяемая часть системы должна быть технически осуществима.
Поэтому чаще всего рассматривается не синтез системы в целом, а лишь синтез корректирующих устройств, т.е. динамический синтез. Существует несколько инженерных расчетных методов синтеза систем. Достаточно эффективен частотный метод, использующий обыкновенные и особенно логарифмические частотные характеристики. Применяются и другие методы, например, метод требуемых передаточных функции, метод корневых годографов или исследования распределения корней, метод Д -разбиения пространства параметров систем и коэффициентов характеристического уравнения, метод модального управления, методы, основанные на базе интегральных оценок качества и другие. Кроме аналитических и графо-аналитических методов синтеза САУ большое распространение получают методы, использующие ЭВМ.
6.2. ЭТАПЫ СИНТЕЗА САУ
Для большого класса САУ можно определить основные этапы синтеза и их последовательность.
1. Изучение и исследование свойств регулируемого объекта, определение его статических и динамических характеристик, формулировка и обоснование требований, которым должна удовлетворять система автоматического регулирования.
2. Выбор функциональной схемы CAP, расчет и выбор основных элементов (чувствительных, исполнительных и др.).
3. Определение порядка астатизма и коэффициента передачи системы. Проводят, исходя из требовании к точности в установившихся режимах при детерминированных воздействиях. Коэффициент передачи системы определяют по требуемой величине астатизма или добротности (в случае статических САУ). Если коэффициент оказывается настолько большим, что затрудняет обеспечение устойчивости системы, то целесообразно повысить порядок астатизма и тем самым свести до нуля заданную установившуюся ошибку вне зависимости от значения коэффициента передачи системы. При этом становится возможным величину коэффициента выбирать, исходя только из соображений устойчивости и качества переходных процессов.
На этом, же этапе решается вопрос о применении воздействии по основному возмущению (или по нескольким из них), т.е. о переходе к комбинированной САУ. Это целесообразно, если, во-первых, имеется возможность достаточно просто измерить данное возмущение, и, во-вторых, когда в результате введения компенсации этого возмущения существенно упростится замкнутый контур САУ. Последнее будет иметь место, если при отсутствии компенсации для получения нужной точности требуется достаточно большой коэффициент передачи в контуре, а введение компенсации позволяет его значительно уменьшить.
4. Синтез корректирующих устройств. На этом этапе синтеза САУ определяются характеристики, схемы, передаточные функции и параметры корректирующих устройств, исходя из требований к динамическим свойствам системы.
5. Анализ спроектированной системы с целью проверки расчетным или, экспериментальным путем удовлетворения требований, предъявленных к системе. На этом этапе строится переходный процесс, и определяются основные показатели качества.
Для исследования спроектированной системы и уточнения ее параметров часто применяют методы моделирования на компьютерах.
6.3. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ДИНАМИЧЕСКИМ
СВОЙСТВАМ САУ
Требования, предъявляемые к динамическим свойствам САУ, включают, как правило, требования к устойчивости, точности и качеству регулирования. Основные из этих требовании следующие:
1. Запасы устойчивости по фазе и амплитуде.
2. Статическая ошибка.
3. Порядок астатизма.
4. Максимальное время переходного процесса при единичном скачкообразном воздействии.
5. Максимальное значение перерегулирования, вызванное единичным скачкообразным воздействием.
6. Коэффициенты ошибки по скорости С1 и ускорению С2.
Кроме перечисленных могут задаваться и другие требования, например, требования к степени устойчивости, колебательности, полосе пропускания, максимальному отклонению регулируемой величины и др.
МЕТОДЫ КОРРЕКЦИИ ДИНАМИЧЕСКИХ СВОЙСТВ САУ.
ПОСЛЕДОВАТЕЛЬНЫЕ И ПАРАЛЛЕЛЬНЫЕ КОРРЕКТИРУЮЩИЕ
УСТРОЙСТВА
Для улучшения динамических свойств САУ могут применяться последовательные, параллельные и смешанные схемы включения корректирующих устройств (КУ) (рис. 6.1).
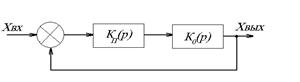
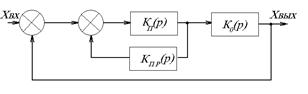
Рис. 6.1
Выбор схемы включения корректирующих устройств решается, исходя из преимуществ и недостатков, свойственных каждому из приведенных вариантов.
Последовательное включение КУ, при введении производных в основную цепь регулирования, увеличивает скорость управляющего воздействия, но одновременно усиливается вредное воздействие высокочастотных возмущений. Кроме того, повышение скорости воздействия требует повышения мощности системы и ее прочности.
Введение интегралов в закон регулирования делает систему астатической и устраняет статическую ошибку. Вместе с тем, для обеспечения устойчивости астатических систем приходится значительно усложнять схему САУ.
Обратные связи имеют преимущества по сравнению с последовательными. Они менее чувствительны к внешним воздействиям и изменениям параметров основной цепи регулирования и не усиливают помех.
Основным преимуществом обратных связей является то, что они уменьшают влияние нестабильности параметров и характеристик шунтируемых элементов на динамические характеристики системы. В связи с этим в таких системах могут применяться более простые и дешевые элементы.
Недостатки параллельной коррекции:
а) более сложная схема включения и сами, параллельные КУ, как правило, сложнее последовательных;
б) возникает необходимость применения согласующих элементов;
в) возможны перегрузки цепи, охваченной корректирующим контуром.
Последовательные корректирующие элементы выгодно отличаются от параллельных простотой и возможностью расширения полосы пропускания частот при включении дифференцирующего элемента в цепь регулирования.
Однако они обладают следующими недостатками:
а) ослабляют основной сигнал в цепи управления, что требует дополнительного усиления;
б) увеличивают чувствительность системы к помехам (при расширении полосы пропускания);
в) качество работы САУ существенно зависит от стабильности характеристик и параметров системы;
г) в интегрирующих элементах приходится применять конденсаторы большой емкости;
д) требуются большие входные сигналы постоянного тока;
е) необходимость согласования входов и выходов КУ с блоками системы.
Рис. 6.2
Несмотря на сказанные недостатки, последовательные КУ нашли широкое применение в силу своей простоты. В качестве последовательных КУ чаще всего применяют пассивные электрические или активные четырехполюсники. На рис. 6.2 показаны возможные схемы включения корректирующих устройств в системе стабилизации летательного аппарата (ЛА) по одной из угловых координат, например, по тангажу. При этом в качестве последовательных корректирующих устройств могут применяться не только электрические цепочки (схема А), но и более сложные элементы, например, гироскопические датчики угловых скоростей (схема Б), гиротахоакселерометры (схема В) и др. В качестве местных обратных связей чаще всего применяются потенциометры, выполняющие функции жесткой обратной связи или тахогенераторы, обеспечивающие гибкую обратную связь.
6.5. МЕТОДЫ КОРРЕКЦИИ ДИНАМИЧЕСКИХ СВОЙСТВ СИСТЕМЫ,
ОСНОВАННЫЕ НА ПРЕОБРАЗОВАНИИ СИГНАЛОВ ОШИБКИ
Как известно, принцип автоматического управления связан с воздействием автоматического регулятора на регулируемый объект в зависимости от величины сигнала ошибки. В общем случае управление можно осуществлять не только по сигналу ошибки, но и в зависимости от производных и интегралов от ошибки.
Закон управления в этом случае можно представить следующим образом:
 , (6.1)
, (6.1)
где y(t)- закон управления;
Dx(t)- сигнал ошибки;
 - символ дифференцирования или интегрирования в зависимости
- символ дифференцирования или интегрирования в зависимости
от знака j;
 - постоянные коэффициенты.
- постоянные коэффициенты.
Закон регулирования (6.1) в общем виде практически реализовать нельзя, также, как нельзя создать идеальную САР. Поэтому на практике ограничиваются реализацией частных случаев закона регулирования, оставляя в выражении (6.1) 2-3 слагаемых. Например, в системах стабилизации ЛА по угловым координатам применяют законы управления по углу, угловой скорости, угловому ускорению и интегралу от угла отклонения ЛА.
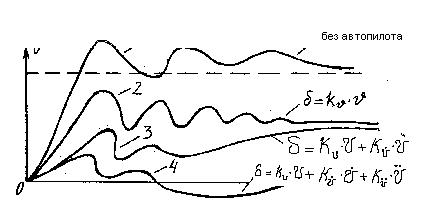
На рис.6.3 приведены графики изменения угла тангажа при действии постоянного возмущающего момента для различных законов регулирования в автопилоте (АП).
При отсутствии АП (кривая 1) колебания ЛА затухают под действием аэродинамических моментов, возникающих при вращении ЛА вокруг его поперечной оси.
Применение АП с законом регулирования по углу отклонения ЛА (кривая 2) несколько увеличивает колебательность системы, однако установившаяся ошибка существенно уменьшается. Регулирование по углу и угловой скорости (кривая 3), не уменьшая установившуюся ошибку, дает более интенсивное затухание колебании ЛА. При соответствующем выборе параметров АП, переходный процесс может быть апериодическим.
Астатический автопилот, осуществляющий регулирование по углу, угловой скорости и угловому ускорению (кривая 4), обеспечивает необходимое затухание колебании и ликвидирует установившуюся ошибку.
Лекция 18
План лекции:
1. Построение желаемой ЛАХ.
2. Желаемые ЛАХ следящих систем.
3. Рекомендуемая литература [1, 8, 5, 3 ].
6.5. ДИНАМИЧЕСКИЙ СИНТЕЗ САУ, ОСНОВАННЫЙ
НА ПОСТОРОЕНИИ ЖЕЛАЕМОЙ ЛАЧХ
Широкое применение при синтезе САУ нашел метод логарифмических частотных характеристик (ЛЧХ). Этот метод обладает достаточной простотой и наглядностью. Идея метода основана на известной связи между переходным процессом и логарифмической амплитудной частотной характеристикой (ЛАЧХ). Зная желаемый вид переходного процесса, легко построить соответствующую такому процессу желаемую ЛАЧХ. Далее к виду желаемой ЛАЧХ приближают исходную ЛАЧХ некорректированной системы. Желаемая ЛАЧХ разомкнутой системы строится исходя из требовании, предъявляемых к системе.
Основными из них считаются: коэффициент усиления (определяемый точностью ее работы), порядок астатизма системы, время переходного процесса, запас устойчивости по фазе (определяемый величиной перерегулирования).
Желаемая ЛАЧХ может быть разделена на три части: низкочастотную, среднечастотную и высокочастотную (рис. 6.4).
1. Низкочастотная часть ЛАЧХ определяется требуемой точностью работы системы, которая зависит от коэффициента усиления системы в разомкнутом состоянии и порядком ее астатизма.
Частотный интервал низкочастотной части характеристики лежит в пределах от минимальных начальных частот до частот первого сопряжения аппроксимированной характеристики. Наклон начального низкочастотного отрезка характеристики определяется величиной (– 20 ν дБ/дек), где ν - порядок астатизма системы. Указанный начальный отрезок характеристики должен переходить через точку с ординатой 20lgk, и абсциссой, равной 1, где k - требуемый коэффициент усиления системы.
2. Среднечастотная асимптота желаемой ЛАЧХ определяет качество CAP. Установлено, что удовлетворительное качество регулирования получается в том случае, если наклон ЛАЧХ в области частоты среза w с составляет (- 20 дБ/дек).
Частота среза определяется требуемым временем переходного процесса tпп и перерегулированием s %:
 ,
,
где k0 выбирается в зависимости от допустимой величины перерегулирования.
Так, при допустимом перерегулировании s % =15… 30% выбирается k0 =1,3…2,5.
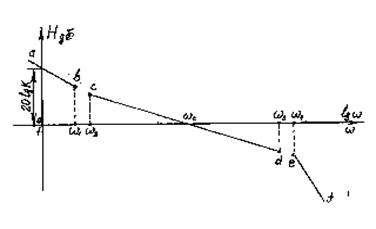
Рис. 6.4
Частоты сопряжения центрального отрезка среднечастотной части ЛАЧХ, пересекающего ось абсцисс при частоте w с, с предыдущим и последующим отрезками могут быть выбраны в соответствии с обозначениями, приведенными на рис. 6.4, исходя из следующих соображений.
Величину центрального отрезка можно определять также по частотным интервалам, так, чтобы интервалы (w 2-w с) и (w с-w 3) были равны 0,5…0,9 декады. Здесь следует брать интервалы тем больше, чем более высокое качество требуется от переходного процесса чем больше величины интервалов (w 2-w с)и (w с-w 3) быстрее затухает переходной процесс, поэтому окончательный выбор этих интервалов должен быть согласован с требованиями к переходному процессу.
Сопряжение центрального отрезка ЛАЧХ с низкочастотной частью производится прямой с наклоном - (40 ¸ 60) дБ/дек.
Так как высокочастотная асимптота ЛАЧХ мало влияет на вид переходного процесса, то для того, чтобы не усложнять КУ, она выбирается аналогичной ЛАЧХ исходной нескорректированной системы, обычно ее наклоны составляют - (40 ¸ 60) дБ/дек. В литературе известны и другие подходы к выбору и построению желаемой ЛАЧХ в зависимости от типа проектируемой системы и от требовании к ее динамическим свойствам. Так, выбор желаемых запасов устойчивости по фазе Dj° и амплитуде DН дБ в зависимости от допустимого перерегулирования s% можно производить по графикам, приведенным на рис. 6.5.
Частоту среза можно выбирать таким образом, чтобы выполнялось следующее неравенство:
wс min ≤ wc ≤ wc opt,
где w c opt =2/Tmin - частота среза, соответствующая оптимальному переходному процессу, т.е. процессу с наименьшим временем переходного процесса Tmin. Время оптимального переходного процесса Tmin определяется по формуле:
 , (6.2)
, (6.2)
где gmax -максимальное значение второй производной от регулируемой величины x, соответствующее оптимальному переходному процессу;
хmax - максимальное допустимое значение регулируемой величины.
На рис. 6.6 приняты следующие обозначения:
smax - максимально допустимое перерегулирование;
t max - максимально допустимое время переходного процесса;
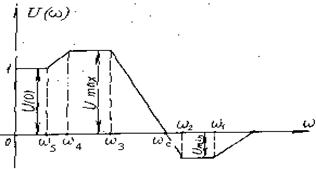
Umax - максимальное значение вещественной частотной характеристики.
 , k = 0, 1, 2, 3,...
, k = 0, 1, 2, 3,...
Графики функции t max и smax (рис. 6.6) справедливы для случая, когда вещественная частотная характеристика имеет вид, показанный на рис. 6.7 при определенном соотношении координат U( 0 ), Umin,Umax и ωi.
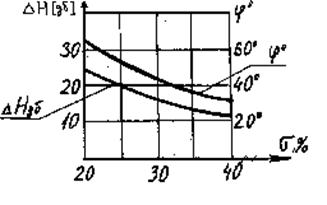
Рис. 6.5
Минимальное значение частоты среза w с min определяют по графикам,
показанным на рис. 6.6.
Выполнение неравенства (6.1) гарантирует перерегулирование и время переходного процесса не выше заданных.
При построении желаемой ЛАХ следящих систем первого порядка астатизма можно использовать следующие рекомендации.
Низкочастотная асимптота проводится так, чтобы она имела наклон (- 20) дБ/дек, соответствующий астатизму первого порядка.
Продолжение асимптоты должно пересечь ось частот при частоте, равной желаемой добротности по скорости:
 , (6.3)
, (6.3)
где С 1 - заданный коэффициент ошибки.
.
При однократном изломе в точке В (рис. 6.8) первая сопрягающая частота определяется по формуле
 , (6.4)
, (6.4)
где DW= 2/С2 - добротность системы пo ускорению, а при двукратном изломе - по формуле
 . (6.5)
. (6.5)
1.0 1.1 1.2 1.3 1.4 1.5 Umax
Рис. 6.6 Рис.6.7
Рис.6.8
Для облегчения построения желаемой ЛАЧХ вводятся типовые передаточные функции и им соответствующие ЛАЧХ.
При построении желаемой ЛАЧХ нужно следить, чтобы она, как можно меньше отличалась от располагаемой ЛАЧХ, что необходимо для упрощения КУ. Это замечание особенно относится к низкочастотной и высокочастотной частям ЛАЧХ. Желательно делать так, чтобы, по крайней мере, первая низкочастотная и последняя высокочастотная асимптоты обеих ЛАЧХ сливались вместе. Совпадение низкочастотных асимптот ЛАЧХ достигается за счет выбора соответствующего коэффициента усиления, равного требуемому. Совпадение высокочастотных асимптот достигается, соответствующим выбором желаемой ЛАЧХ в высокочастотной области.
После формирования всей желаемой ЛАЧХ необходимо проверить, выдерживается ли требуемое значение запаса по фазе, определяемое из графика на рис. 6.5 для модулей, лежащих в пределах:
Н1 ³ Н(w) ³ Н2.
Для этой проверки необходимо подсчитать фазовый сдвиг в двух крайних точках среднечастотной асимптоты, имеющей наклон (- 20) дБ/дек, т.е. при частотах w 2 и w 3 Подсчет фазового сдвига делается на основании принятой желаемой передаточной функции. Так, например, для передаточной функции типа (20…40…20…40) он равен
y = -90°- arctgwT1 + arctgwT2 - arctgwT3.
Если требуемый запас по фазе не выдержан, то необходимо расширить среднечастотный участок и произвести вновь проверку.
Чтобы окончательно убедиться в приемлемости сформированной ЛАЧХ, можно по известной желаемой передаточною функции построить любым методом переходный процесс и проверить величины s% и tпп.
Далее из ординат желаемой ЛАЧХ вычитаются ординаты располагаемой ЛАЧХ. Получившаяся ЛАЧХ соответствует передаточной функции последовательного корректирующего звена. При необходимости это звено может быть пересчитано на эквивалентную обратную связь или эквивалентное параллельное корректирующее звено.
Лекция 19
План лекции:
1. Синтез последовательного корректирующего устройства.
2. Синтез параллельного корректирующего устройства.
3. Рекомендуемая литература [1,3,4,5 ].
6.6. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
Включение корректирующего устройства (КУ) в основную цепь системы последовательно с основными элементами системы показано на рис. 6.9.








