 2014-02-02
2014-02-02 5551
5551Интегрирующие звенья
Различают два вида интегрирующих звеньев: идеальные и реальные. Общей особенностью интегрирующих звеньев является пропорциональность производной выходной величины мгновенному значению входной величины. У идеального интегрирующего звена пропорциональность существует в любой момент времени после подачи ступенчатого воздействия, а у реального – только после завершения переходного процесса в звене.
Дифференциальное уравнение звена обычно записывается в виде
 , (3.36)
, (3.36)
где коэффициент пропорциональности k 1 зависит от конструктивных параметров звена и имеет размерность единицы скорости измерения выходной величины, деленной на единицу измерения входной величины х вх(t). Если в уравнение (3.36) х вых(t) и х вх(t) имеют одинаковую размерность, то коэффициент пропорциональности k 1 будет иметь размерность – единица, деленная на секунду (1/с). Тогда (3.36) можно записать в другом виде:
 , (3.37)
, (3.37)
где  [с] – постоянная времени звена.
[с] – постоянная времени звена.
Уравнениям (3.36) и (3.37) соответствуют интегральные соотношения
 и
и  . (3.38)
. (3.38)
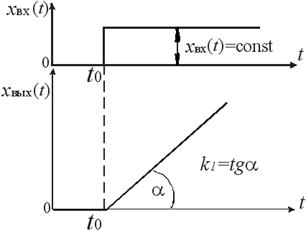
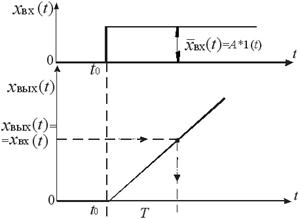
При однократном ступенчатом воздействии х вх(t)=const имеем
 и
и  , (3.39)
, (3.39)
где С – константа интегрирования, равная нулю при нулевых начальных условиях.
Временные характеристики, согласно (3.39), будут представлять собой прямые линии (рис. 3.11, а,б).
 |  | |
| а | б | |
| Рис. 3.11. Временные характеристики идеального интегрирующего звена | ||
При t=T из (3.39) имеем х вых(t)= х вх(t). Это дает возможность численно определить постоянную времени Т (рис.3.11, б) или коэффициент пропорциональности (рис. 3.11, а).
Передаточные функции звена имеют вид
 и
и  . (3.40)
. (3.40)
Амплитудно-фазовые характеристики
 и
и  (3.41)
(3.41)
имеют только мнимую часть Jm (w). Действительная часть равна Re(w)=0.
Амплитудно-частотная характеристика равна
 и
и  . (3.42)
. (3.42)
 и
и  (3.43)
(3.43)
Из (3.42) следует, что А (w)изменяется при изменении частоты от 0 до ¥ от А (0)=¥ до нуля (А (¥)=0), а фазовый сдвиг не зависит от частоты и равен -p/2 (3.43).
Примерами элементов автоматических систем, динамические свойства которых эквивалентны свойствам идеального интегрирующего звена, являются: электродвигатель постоянного тока (рис.3.12, а), в котором х вх – подаваемое напряжение U вх, а х вых – угол поворота вала двигателя a; емкость с жидкостью (рис 3.12, б), в которой х вх – приток жидкости Q 1, а х вых – уровень жидкости Н; гидравлический сервомотор (рис. 3.12, в), в котором х вх – перепад давления D р на поршне сервомотора, х вых – его перемещение h, и др.
Реальные интегрирующие звенья обычно обладают заметной инерционностью.
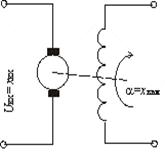 |  | 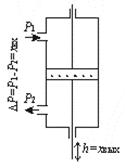 |
| а | б | в |
| Рис.3.12. Примеры интегрирующих звеньев |








