 2014-02-02
2014-02-02 4026
4026Оценка качества регулирования
Под качеством регулирования понимается способность САР поддерживать заданный закон регулирования с определенной точностью. При этом точность оценивается как в установившемся, так и в переходном режимах. Поэтому при оценке качества регулирования решаются две задачи:
- оценка точности в установившемся режиме;
- оценка качества регулирования в переходном режиме.
Ошибка регулирования в установившемся режиме определяется по выражению
 , (5.1)
, (5.1)
где D y0 – ошибка воспроизведения задающего воздействия y *(t); D yf – ошибка, создаваемая возмущающими воздействиями. В курсе лекций подробно рассматривается только D y0.
Точность САР в установившемся режиме зависит от статизма системы.
Регулирование называется статическим, если установившееся после окончания переходного процесса значение регулируемой y (t) при различных постоянных значениях задающего воздействия y* (t), также принимает различные постоянные значения, зависящие от величины y* (t). Другими словами, статический регулятор поддерживает не строго постоянное значение регулируемой переменной, а с некоторой ошибкой
 , (5.2)
, (5.2)
где y *(t0) – постоянное значение задающего воздействия, измененное в момент времени t0; y (¥) – установившееся значение. Величина D ст называется статической (установившейся) ошибкой, которая, в общем случае, рассматривается как остаточное отклонение регулируемой переменной y (t) после окончания переходного процесса. На рис. 5.1 приведены кривые, характеризующие появление статической ошибки.
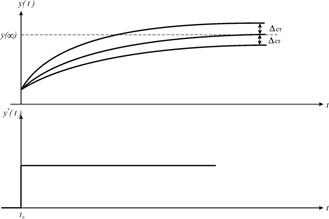
Рис. 5.1. Кривые переходного процесса, характеризующие появление статической ошибки
В некоторых САР статическая ошибка нежелательна, т.е. необходимо, чтобы D ст =0. Это достигается использованием астатического регулирования. Регулирование называется астатическим, если в установившемся режиме поддерживается постоянное значение регулируемой переменной, равное задающему воздействию, независимо от величины этого воздействия. Для получения астатического регулирования необходимо устранить жесткую связь между положением регулирующего органа и значением регулируемой переменной с тем, чтобы заданное значение регулируемой переменной можно было поддерживать при любой нагрузке. Это достигается введением в цепь астатических (интегрирующих) звеньев.
При произвольном изменении задающего воздействия y* (t) ошибка регулирования в установившемся режиме представляет собой медленно изменяющуюся во времени функцию D y (t). Эту функцию можно представить в виде следующего ряда:
 , (5.3)
, (5.3)
где с0, с1, с2,… называются коэффициентами ошибок по задающему воздействию.
Для определения коэффициентов ошибок используется передаточная функция ошибки по задающему воздействию:
 , (5.4)
, (5.4)
где Wp (p) – передаточная функция разомкнутой части САР. Отсюда имеем, что:
 (5.5)
(5.5)
Коэффициент с0 называется коэффициентом статической ошибки. Коэффициент с0 в статической САР  , а в астатической САР
, а в астатической САР  , где kp – коэффициент передачи разомкнутой части САР.
, где kp – коэффициент передачи разомкнутой части САР.
Коэффициент c1 называется коэффициентом скоростной ошибки, который в астатической САР первого порядка:  , где kv коэффициент передачи разомкнутой части САР по скорости.
, где kv коэффициент передачи разомкнутой части САР по скорости.
Коэффициент с2 называется коэффициентом ошибки от ускорения, который в астатической САР второго порядка:  , где kа коэффициент передачи разомкнутой части САР по ускорению.
, где kа коэффициент передачи разомкнутой части САР по ускорению.
Особенность коэффициентов ошибок состоит в том, что с увеличением коэффициента передачи разомкнутой части САР уменьшаются все виды ошибок, т.е. статическая, скоростная и от ускорения. Предельное значение коэффициента передачи разомкнутой части САР определяется условиями устойчивости системы.








