 2014-02-02
2014-02-02 2075
2075Каждая из рассмотренных выше прямых и косвенных оценок качества регулирования характеризует лишь одно какое-либо свойство системы, лишь один признак переходного процесса или частотной характеристики. Причем, все оценки качества связаны с настроечными параметрами регуляторов сложными зависимостями, имеющие, как правило, противоречивый характер: изменение параметра регулятора приводит к улучшению одних характеристик и ухудшению других характеристик. Поэтому в инженерной практике широко используются интегральные оценки качества.
Простейшей интегральной оценкой является линейная интегральная оценка
 , (5.15)
, (5.15)
где e (t)= y (¥)- y (t) и которая равна площади заключенной между прямой y (¥) и кривой переходного процесса y (t) (рис. 5.5). Оценка I1 учитывает как величину
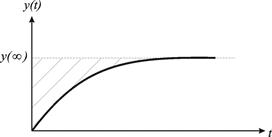
Рис. 5.5. Определение линейной интегральной оценки
динамических отклонений, так и длительность их существования. Чем меньше оценка I1, тем лучше качество процесса управления.
Недостаток оценки I1 состоит в том, что ее можно использовать для заведомо не колебательных процессов (рис. 5.6).
В системах с перерегулированием в связи с неоднократным изменением знака ошибки, происходит вычитание ошибки при разных знаках (рис. 5.7). Это приводит к тому, что оценка I1 не будет однозначно связана с действительным качеством регулирования.
Для таких случаев применяется квадратичная интегральная оценка
 , (5.16)
, (5.16)
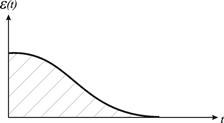
Рис. 5.6. Линейная интегральная оценка монотонного переходного процесса

Рис. 5.7. Линейная интегральная оценка колебательного процесса
график которой для процессов с перерегулированием приведен на рис. 5.8.
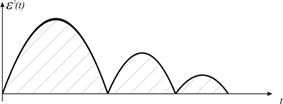
Рис. 5.8. Квадратичная интегральная оценка

