 2014-02-02
2014-02-02 1268
1268СТАТИСТИЧЕСКИЕ РЕШЕНИЯ ПРИ НАЛИЧИИ ЗОНЫ НЕОПРЕДЕЛЕННОСТИ И ДРУГИЕ ОБОБЩЕНИЯ
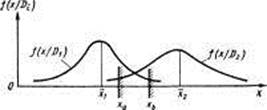
В некоторых случаях, когда требуется высокая надежность распознавания (большая стоимость ошибок пропуска цели и ложной тревоги), целесообразно ввести зону неопределенности (зону отказа от распознавания). Правило решения будет следующим
при  отказ от распознавания.
отказ от распознавания.
 |
Разумеется, отказ от распознавания является нежелательным событием. Он свидетельствует, что имеющейся информации недостаточно для принятия решения и нужны дополнительные сведения.
рис. 5. Статистические решения при наличии зоны неопределенности
Определение среднего риска. Величина среднего риска при наличии зоны отказа от распознавания может быть выражена следующим равенством
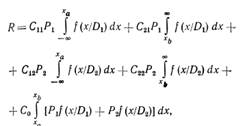
где Co — цена отказа от распознавания.
Отметим, что Со > 0, иначе задача теряет смысл («вознаграждение» за отказ от распознавания). Точно так же С11 < 0, С22 < 0, так как правильные решения не должны «штрафоваться».
Метод минимального риска при наличии зоны неопределенности. Определим границы области принятия решения, исходя из минимума среднего риска.
Если не поощрять правильные решения (С11 = 0, С22 = 0) и не платить за отказ от распознавания (С0 = 0), то область неопределенности будет занимать всю область изменения параметра.
Наличие зоны неопределенности дает возможность обеспечить заданные уровни ошибок за счет отказа от распознавания в «сомнительных» случаях
Статистические решения для нескольких состояний. Выше были рассмотрены случаи, когда статистические решения принимались для различения двух состояний (дихотомия). Принципиально такая процедура позволяет провести разделение на n состояний, каждый раз объединяя результаты для состояния D1 и D2. Здесь под D1 понимаются любые состояния, соответствующие условию «не D2». Однако в некоторых случаях представляет интерес рассмотреть вопрос и в прямой постановке — статистические решения для классификации n состояний.
Выше рассматривались случаи, когда состояние системы (изделия) характеризовалось одним параметром х и соответствующим (одномерным) распределением. Состояние системы характеризуется диагностическими параметрами х1 х2,..., хn или вектором х:
х=(х1 х2,...,хn).

