2014-02-03
2014-02-03 879
879Рис.37
Рис.36
По определению момент инерции  .
.
Поместим в точку О начало координатных осей x, y, z. Из прямоугольного треугольника ОАМi следует  , где
, где  . И так как радиус-вектор точки
. И так как радиус-вектор точки , то, проектируя это равенство на ось u, получим
, то, проектируя это равенство на ось u, получим  (
( ,
,  ,
,  - углы между осью u и осями x, y, z).
- углы между осью u и осями x, y, z).
Рис. 14.3.
Как известно из тригонометрии 
Поэтому

И, группируя подобные члены, содержащие косинусы одинаковых углов, получим:

Но  - расстояния от точки М i до осей x, y, z, соответственно. Поэтому
- расстояния от точки М i до осей x, y, z, соответственно. Поэтому

или
 (2)
(2)
где Ix, Iy, Iz – моменты инерции тела относительно осей координат; Ixy, Jyz, Jxz - центробежные моменты инерции относительно осей отмеченных в индексах.
Если два центробежных момента инерции, оба содержащих в индексах названия какой-нибудь одной оси, равны нулю, то эта ось называется главной осью инерции. Например, если Jyz = 0 и Jxz = 0, то ось z – главная ось инерции.
Так как все моменты инерции зависят от того, где находится точка О, от выбора начала координат, то обязательно надо указать для какой точки определены эти моменты инерции. Если начало координат взято в центре масс С, то все главные оси инерции называются главными центральными осями инерции.
Если в данной точке координатные оси являются главными осями инерции (центробежные моменты инерции относительно их равны нулю), то формула (2) упрощается:
 . (3)
. (3)
Иногда по некоторым признакам нетрудно найти главные оси инерции тела.
1. Если у однородного тела имеется ось симметрии, то эта ось является главной центральной осью инерции.
Действительно. Направим координатную ось z по оси симметрии. Тогда для каждой точки тела с координатами (xi, yi, zi) можно отыскать точку с координатами (-xi, -yi, -zi) и поэтому центробежные моменты инерции  и
и  . Значит ось z – главная ось инерции, и центральная ось, т.к. центр масс, как известно, находится на оси симметрии. Причём, эта ось будет главной для любой точки расположенной на оси симметрии.
. Значит ось z – главная ось инерции, и центральная ось, т.к. центр масс, как известно, находится на оси симметрии. Причём, эта ось будет главной для любой точки расположенной на оси симметрии.
2. Если у однородного тела имеется плоскость симметрии, то любая ось перпендикулярная ей будет главной осью инерции для всех точек этой плоскости.
Направим ось z перпендикулярно плоскости симметрии из любой её точки О, назначив там начало координат. Тогда для каждой точки тела с координатами (xi, yi, zi) можно найти симметричную ей точку с координатами (xi, yi, - zi). Поэтому центробежные моменты инерции Ixz и Iyz будут равны нулю. Значит ось z – главная ось инерции.
Пример 9. Определим момент инерции диска относительно оси u, расположенной под углом к оси симметрии диска z (рис.37).
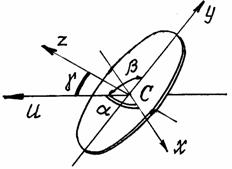
Оси x, y и z – главные центральные оси инерции, т.к. они являются осями симметрии.
Тогда , где - угол между осями u и z; угол - угол между осями u и y, равный  ; угол - угол между осями u и x, равный 90°. Поэтому
; угол - угол между осями u и x, равный 90°. Поэтому

Дифференциальные уравнения движения системы.
Рассмотрим систему, состоящую из п материальных точек. Выделим какую-нибудь точку системы с массой  . Обозначим равнодействующую всех приложенных к точке внешних сил (и активных и реакций связей) через
. Обозначим равнодействующую всех приложенных к точке внешних сил (и активных и реакций связей) через  , а равнодействующую всех внутренних сил - через
, а равнодействующую всех внутренних сил - через  . Если точка имеет при этом ускорение
. Если точка имеет при этом ускорение  , то по основному закону динамики
, то по основному закону динамики
 .
.
Аналогичный результат получим для любой точки. Следовательно, для всей системы будет:
Эти уравнения, из которых можно определить закон движения каждой точки системы, называются дифференциальными уравнениями движения системы в векторной форме. Уравнения являются дифференциальными, так как  ; входящие в правые части уравнений силы будут в общем случае зависеть от времени, координат точек системы и их скоростей.
; входящие в правые части уравнений силы будут в общем случае зависеть от времени, координат точек системы и их скоростей.
Проектируя на какие-нибудь координатные оси, мы можем получить дифференциальные уравнения движения системы в проекциях на эти оси.
Полное решение основной задачи динамики для системы состояло бы в том, чтобы, зная заданные силы, проинтегрировать соответствующие дифференциальные уравнения и определить таким путем закон движения каждой из точек системы в отдельности.
Однако такой путь решения обычно не применяется по двум причинам. Во-первых, этот путь слишком сложен и почти всегда связан с непреодолимыми математическими трудностями. Во-вторых, в большинстве случаев при решении задач механики бывает достаточно знать некоторые суммарные характеристики движения системы в целом, а не движение каждой из ее точек в отдельности. Эти суммарные характеристики определяются с помощью общих теорем динамики системы, к изучению которых мы и перейдем.
Основная роль уравнений состоит в том, что они, или следствия из них, являются исходными для получения соответствующих общих теорем.
Общие теоремы динамики механической системы: теоремы о движении центра масс механической системы и об изменении количества движения, теоремы об изменении кинетического момента и кинетической энергии, -являются следствием основного уравнения динамики. Данные теоремы рассматривают не движение отдельных точек и тел, входящих в механическую систему, а некоторые интегральные характеристики, такие как движение центра масс механической системы, ее количество движения, кинетический момент и кинетическую энергию. В результате из рассмотрения исключаются неизвестные внутренние силы, а в ряде случаев и реакции связей, что существенно упрощает решения задачи.
В ряде случаев для определения характера движения системы (особенно твердого тела), достаточно знать закон движения ее центра масс. Например, если бросить камень в цель, совсем не нужно знать как он будет кувыркаться во время полета, важно установить попадет он в цель или нет. Для этого достаточно рассмотреть движение какой-нибудь точки этого тела.
Чтобы найти этот закон, обратимся к уравнениям движения системы и сложим почленно их левые и правые части. Тогда получим:
 .
.
Преобразуем левую часть равенства. Из формулы для радиус-вектора центра масс имеем:
 .
.
Беря от обеих частей этого равенства вторую производную по времени и замечая, что производная от суммы равна сумме производных, найдем:
или
 .
.
где  - ускорение центра масс системы. Так как по свойству внутренних сил системы
- ускорение центра масс системы. Так как по свойству внутренних сил системы  , то, подставляя все найденные значения, получим окончательно:
, то, подставляя все найденные значения, получим окончательно:
 (4)
(4)
Уравнение и выражает теорему о движении центра масс системы: произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил. Сравнивая с уравнением движения материальной точки, получаем другое выражение теоремы: центр масс системы движется как материальная точка, масса которой равна массе всей системы и к которой приложены все внешние силы, действующие на систему.
Проектируя обе части равенства на координатные оси, получим:

Эти уравнения представляют собою дифференциальные уравнения движения центра масс в проекциях на оси декартовой системы координат.
Значение доказанной теоремы состоит в следующем.
1) Теорема дает обоснование методам динамики точки. Из уравнений видно, что решения, которые мы получаем, рассматривая данное тело как материальную точку, определяют закон движения центра масс этого тела, т.е. имеют вполне конкретный смысл.
В частности, если тело движется поступательно, то его движение полностью определяется движением центра масс. Таким образом, поступательно движущееся тело можно всегда рассматривать как материальную точку с массой, равной массе тела. В остальных случаях тело можно рассматривать как материальную точку лишь тогда, когда практически для определения положения тела достаточно знать положение его центра масс.
2) Теорема позволяет при определении закона движения центра масс любой системы исключать из рассмотрения все наперед неизвестные внутренние силы. В этом состоит ее практическая ценность.
Так движение автомобиля по горизонтальной плоскости может происходить только под действием внешних сил, сил трения, действующих на колеса со стороны дороги. И торможение автомобиля тоже возможно только этими силами, а не трением между тормозными колодками и тормозным барабаном. Если дорога гладкая, то как бы не затормаживали колеса, они будут скользить и не остановят автомобиль.
Или после взрыва летящего снаряда (под действием внутренних сил) части, осколки его, разлетятся так, что центр масс их будет двигаться по прежней траектории.
Теоремой о движении центра масс механической системы следует пользоваться для решения задач механики, в которых требуется:
- по силам, приложенным к механической системе (чаще всего к твердому телу), определить закон движения центра масс;
- по заданному закону движения тел, входящих в механическую систему, найти реакции внешних связей;
- по заданному взаимному движению тел, входящих в механическую систему, определить закон движения этих тел относительно некоторой неподвижной системы отсчета.
С помощью этой теоремы можно составить одно из уравнений движения механической системы с несколькими степенями свободы.
При решении задач часто используются следствия из теоремы о движении центра масс механической системы.
Следствие 1. Если главный вектор внешних сил, приложенных к механической системе, равен нулю, то центр масс системы находится в покое или движется равномерно и прямолинейно. Так как ускорение центра масс равно нулю,  .
.
Следствие 2. Если проекция главного вектора внешних сил на какую-нибудь ось равна нулю, то центр масс системы или не изменяет своего положения относительно данной оси, или движется относительно нее равномерно.
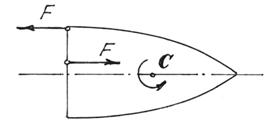
Например, если на тело начнут действовать две силы, образующие пару сил (рис.38), то центр масс С его будет двигаться по прежней траектории. А само тело будет вращаться вокруг центра масс. И неважно, где приложена пара сил.
Кстати, в статике мы доказывали, что действие пары на тело не зависит от того, где она приложена. Здесь мы показали, что вращение тела будет вокруг центральной оси С.