2014-02-03
2014-02-03 703
703Рис.40
Рис.39
Рис.38
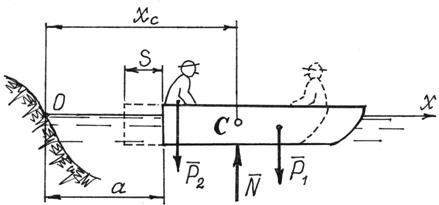
Пример 10. Человек перешел с кормы лодки на нос. Определим перемещение лодки s (рис.39). Вес лодки – Р 1, человека – Р 2, длина лодки – l. Сопротивление движению не учитываем.
Определим движение центра масс С системы, состоящей из человека и лодки.
Составляем дифференциальное уравнение движения центра масс по оси х:  Но так как проекции внешних сил
Но так как проекции внешних сил  ,
,  и
и  на ось х равны нулю, то
на ось х равны нулю, то  Проинтегрировав дважды это уравнение, получим
Проинтегрировав дважды это уравнение, получим  и
и  Но в начале движения система была неподвижна
Но в начале движения система была неподвижна  Значит,
Значит, 
Найдем координату  в первом положении системы, когда человек находился на корме, как координату центра тяжести:
в первом положении системы, когда человек находился на корме, как координату центра тяжести:

И во втором положении, когда человек перейдет на нос лодки:

Приравниваем координаты, т.к. 

Из этого равенства находим перемещение лодки

Пример 11. Рассмотрим систему, которая состоит из однородного стержня ОА и кольца М. Стержень длины L и массы  вращается вокруг горизонтальной оси, проходящей через точку О (рис.40). Кольцо массы m может без трения скользить по стержню. К нему прикреплена пружина, коэффициент жесткости которой равен С. Положение кольца на стержне определяется координатой
вращается вокруг горизонтальной оси, проходящей через точку О (рис.40). Кольцо массы m может без трения скользить по стержню. К нему прикреплена пружина, коэффициент жесткости которой равен С. Положение кольца на стержне определяется координатой  . Определим проекции реакции опоры О на оси неподвижной декартовой системы координат Oxy.
. Определим проекции реакции опоры О на оси неподвижной декартовой системы координат Oxy.
Запишем уравнение теоремы о движении центра масс для рассматриваемой механической системы в векторном виде.
 (5)
(5)
Силы взаимодействия кольца со стержнем и пружиной есть внутренние силы системы, поэтому в уравнении они в явном виде не присутствуют. Проектируя уравнение (5) на оси системы координат Oxy, получаем
 (6)
(6)
По формулам (1) находим координаты центра масс системы
 , (7)
, (7)
затем, дифференцируя (7), запишем
 ,
,
 ,
,
и, наконец, вычисляя вторые производные, получим
 (8)
(8)

Подставляя (8) в уравнения (6), получаем проекции реакции в опоре O на оси неподвижной системы координат:


 Если в полученные уравнения подставить значения обобщенных координат и ускорений для какого-либо момента времени, можно найти величины искомых проекций.
Если в полученные уравнения подставить значения обобщенных координат и ускорений для какого-либо момента времени, можно найти величины искомых проекций.
Кинетический момент механической системы  относительно неподвижного центра O является мерой движения системы вокруг этого центра. При решении задач обычно применятся не сам вектор , а его проекции на оси неподвижной системы координат, которые называются кинетическими моментами относительно оси. Например,
относительно неподвижного центра O является мерой движения системы вокруг этого центра. При решении задач обычно применятся не сам вектор , а его проекции на оси неподвижной системы координат, которые называются кинетическими моментами относительно оси. Например,  - кинетический момент системы относительно неподвижной оси Oz.
- кинетический момент системы относительно неподвижной оси Oz.
Кинетический момент механической системы складывается из кинетических моментов точек и тел, входящих в эту систему. Рассмотрим способы определения кинетического момента материальной точки и твердого тела при различных случаях их движения.
Для материальной точки с массой  , имеющей скорость
, имеющей скорость  , кинетический момент относительно некоторой оси Oz определяется как момент вектора количества движения этой точки относительно выбранной оси:
, кинетический момент относительно некоторой оси Oz определяется как момент вектора количества движения этой точки относительно выбранной оси:

Кинетический момент точки считается положительным, если со стороны положительного направления оси движение точки происходит против часовой стрелки.
Если точка совершает сложное движение, для определения ее кинетического момента следует вектор количества движения  рассматривать как сумму количеств относительного и переносного движений (рис.41)
рассматривать как сумму количеств относительного и переносного движений (рис.41)

Тогда

Но  , где
, где  - расстояние от точки до оси вращения, и
- расстояние от точки до оси вращения, и