 2014-02-03
2014-02-03 412
412В этой системе ограничение тока осуществляется без его непосредственного измерения за счет ограничения разности ЭДС преобразователя и двигателя на допустимом уровне при любой скорости.
½Еп – Ед½ £ Iдоп×Rяц å
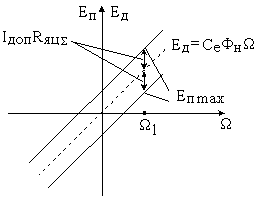 Рисунок 4.12
Рисунок 4.12
|
Если скорость W = const любая, то ограничение называется линейным (см. рисунок 4.12). Применяется в ЭП с двигателями обычного исполнения.
Если ограничение переменное с переменной скоростью, то это нелинейное токоограничение (см. рисунок 4.13). Применяется в ЭП с высокомоментными двигателями.
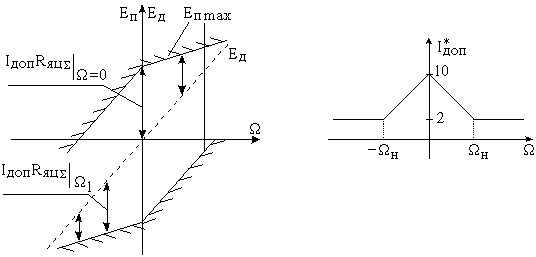 Рисунок 4.13 Рисунок 4.13
|
Поддержание требуемой разности между Ед и Еп осуществляется за счет ограничения на соответствующем уровне (для данной скорости) сигнала управления на входе преобразователя (см. рисунок 4.14).
Еп = кп×Uупр.
На рисунке 4.14 принято обозначение: БО – блок ограничения (линейный).
Статические характеристики системы представлены на рисунке 4.15, где приняты обозначения: ДР, ТР – двигательный и тормозной режимы; ИР – инверторный режим.
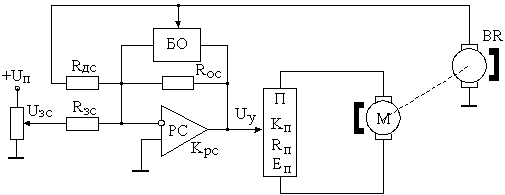 Рисунок 4.14
Рисунок 4.14
|
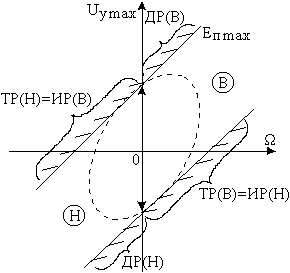 Рисунок 4.15
Рисунок 4.15
|








